I’m thinking about how to make a 3d piston work with physics. Basically, a piston connecting two seperate rigid bodies which can push them away and draw them near. There are no slider constraints for 3d. I tried simply adjusting a constraint’s world positions (using a hinge constraint with zeroed high/low limits) but that doesn’t push the bodies apart, it simply moves the anchor point, as seen in debug renderer.
Anyone have an idea? Feels wasteful to destroy the joint, apply force to the bodies, and recreate the joint.
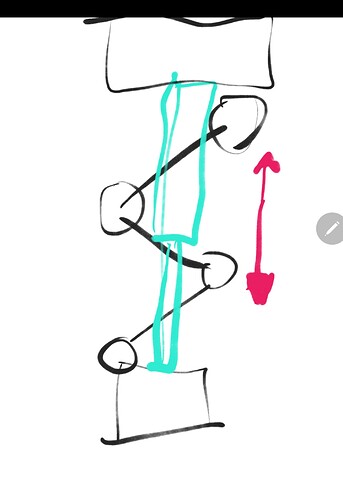
Maybe it could be done with specifically controlled and hidden hinge joints. I might try this. So green is the piston, connecting two box models, sticks/circles are hinges. Piston is only a static model with animation, no rigid body. Might work.