Leith
Archive 17/01/2023.
Dishonourable Discharge - A Zombie Horror Survival Adventure

Leith
Today I gave the zombie 25 attack sounds, and when that felt like not enough, I added pitch variation to adjust the frequency of the sounds with some randomness - I still need to reimport all the animations on this zombie, as for some reason and despite my wishes, they have root motions, and this causes them to walk outside their physics hull - stripping the root motion is necessary, yet I can still learn something from the root motion, such as the velocity of the animation, needed to prevent foot slipping when moving… The attack sounds are loaded into a static array, and remain resident, but they average 200kb in size, and are in PCM wave format - its not a great amount of memory to use up, but this is just one character, anyone have advice about resource management for audio?

Modanung
Maybe you can get rid of the root motion with AnimationController::SetStartBone(...)?
Leith
Hey thanks! probably I could skip root motion using your technique, but still have it in the animation in terms of a measurable velocity, it never occurred to me but it sounds feasible
Currently I have two character types, zombie and player, and a switch in the character update method, but I am thinking seriously about deriving subcharacters, I just have a thing about making more classes than needed, I try not to make new classes.
Modanung
I like having a Controllable class that characters, mounts and vehicles all inherit from. Control can then be easily switched even for unexpected cases like a mind-control-beam mod.
In your case you could even give characters a zombified state. This would keep it one class where AI could take control or the player could switch teams when zombified.
Leith
I tend to think the same way - currently I have a CharacterController that drives the player character (feeds device inputs) but the character class itself, has not been derived - the consequence is that any character can become controlled by the player.
CharacterController holds a reference to a target character, which represents the player character, and the character class currently has switched logic for player and non player characters (zombies, for now) - I am tempted to derive character subclasses, but currently there is not really enough different control code to warrant it. Still early days, but starting to see my undead coming to life. More zombie types coming soon, as well as some human survivor types.
Leith
I’m still thinking about foot-slipping issues, and whether it is worth my time to write an IK based solution to the issue. Our current IK sample does not deal with motion of the character, so it is really half-baked, but probably would act as a good point of reference for a better solution. I note that the Ninja model provides animation triggers on its footfalls for its walk animation - I propose analyzing the animation transforms to find the proper frames to tag for that purpose, and using the resulting events to update the IK targets. Anyone who has already done something like this, would love to hear from you.
Leith
This reminds me - we still have no sample that shows how to properly apply variable frequency to soundsources - it was not difficult to do, but a tiny example might help those who did not grow up with PCM wave audio and understanding how to modify frequency. Personally, I use a scalar to modify the base frequency of the loaded sound, similar to Unity, it’s pretty simple but quite effective.
Leith
My next move is to apply IK to solve ‘foot slipping’ in walk animations, and particularly for non-linear gaits.
If the walk animation gait is linear, we can generally find the right speed to move our model without resorting to IK - at least on a level plane.
But for non-linear gaits, and including inclined planes, the best solution I can think of is applied IK.
I’m using a dynamic character controller - it has dynamic physics, the character is moving, it has some linear velocity - worse still, the linear velocity is subject to change with acceleration - this is not a good fit with the existing IK Sample, so I’m going to adapt that sample to use ‘foot-planting’ based on Animation Trigger events. This basically means that I need to figure out for each footstep, a world position to plant that foot’s IK handle, and some time later when the foot is ready to lift up, release the ik handle. That’s the theory, anyway.
I’d love to hear from anyone who’s already tackled this.
Starting to think that using Animation Triggers is a bad fit with dynamic physics - it’s starting to make more sense to add kinematic rigidbody attachments to the feet, and detect per frame their collision with the ground, both start and end of collision are the points I need to move/disable IK handles on the feet to implement “foot-planting”.
[Edit]
Due to acceleration, and because we’re not analyzing animation in advance, we can only try to ‘guess’ where our next footfall will be - so animation triggers is a bad notion in that context. I’m just sorry I spent a day to make animation triggers work (some issues, raised) and happy to invent some physics foot shapes close to the foot bones
Leith
Today I hacked together a solution for foot-slipping without using IK, a cheap form of foot-planting.
I have two animation trigger keys on my Walk animation which represent the frames in my walk cycle where a foot is just starting to touch the ground, ie, being “planted”. It’s worth noting that my walk cycle is not linear - its a staggering zombie, could be a wounded soldier, etc.
In my handler for animation trigger events, I use booleans to note which foot is currently being “planted”, and also note the world position of the planted foot at the time it was planted.
Very late in the scene (SceneDrawableUpdateFinished) I grab the current worldspace position of the planted foot, measure how far it has “slipped” (due to physics) and subtract the resulting “positional error” from the worldspace position of the character’s root node, which results in the character being “teleported” such that the planted foot remains where it was planted.
The results look quite good for my staggering zombie whose linear velocity and animation speed are both increasing over time (he speeds up his “walk”).
Video : The solution was applied to the zombie, but not the player character.
https://www.dropbox.com/s/qzuo1wcyzylyvbz/FootSlipping.mp4?dl=0

Dave82
Can you just upload it on youtube ? I can’t watch your video or download it.
Leith
is the dropbox link not working? i had to put some spaces in the https at the front of it
i would rather not youtube or facebook except to establish prior art
the dropbox should be alive
Modanung
To prevent a onebox from being created you can put a link between < >.
Looks pretty nice, btw. 
Leith
Happy to hear my ideas are well received - though in this case, the idea was not mine, it’s something that 3D artists use in their modelling apps (via scripting) to deal with foot-slipping on animations that contain no root-motion. My implementation for Urho is my original work, but this concept was not mine… just never seen it applied to models being driven by dynamic physics, in a game.
NinjaSnowWar would look a lot better with this added to it - and already has suitable animation triggers on the footfalls. I’d be happy to provide source / explain anything required to see this constraint added to that sample.
Leith
Modanung - thanks for the heads up about the < > stuff - it explains to me why xml is such an issue to post here!
Modanung
Oh, but you can always mark bits of code with grave accents ( ` ). Single ones for within a line, and three of them to mark the start and end of a code block. Markdown also supports inline html, btw.
Leith
Is there a document somewhere that describes these things, or is this just something we learn from being here, and with much thanks to kind people who have been here longer?
Modanung
Does this text seem familiar somehow? 
Type here, Use Markdown, BBCode, or HTML to format. Drag or paste images.
Before the Urho3D forums switched to Discourse I was already familiar with Markdown through sites like Github and Diaspora*.
Leith
Markdown is not familiar to me - I come from older stock, such as PHPBB and earlier bulletin boards that predate the current tech. I don’t know the markups. Would make a useful addition to be able to read about them in one place, thanks.
Modanung
That’s what the second link in this post was for:
A websearch for “Markdown syntax” will get you several other sources. There might be some discrepancies here and there because of different implementations.
Leith
Oh, I intend to look into it, but I was hoping, in vain, for a link to a document. I state that I am lazy by nature, but not that I am lazy by definition. Lazy like a fox, to quote Homer Simpson.
Leith
I appreciate your help, I truly do, it should not take me too long to stop asking the “stupid questions”.
Leith
Today, I gave the player character an idle animation, and added three more walk animations - so now I have four walks - left, right, forward and backward… time to start experimenting with weighted blending. I’m of the opinion that basing the blend weight only on which keys are being pressed is the wrong idea, I have linear velocity, and a Facing direction… and feel compelled to use that to determine the weighting for blending these animations. Anyone have tips on this?
[EDIT]
I am not certain that the animations have the same length, this could be a problem too. I currently set the animation speed in proportion to the linear velocity, but I didn’t account for blending animations of different length.
Leith
Today I am trying to figure out a cheap way to implement Unity’s notion of BlendTrees for blending locomotion animations. Ideally, any number of input animations can be blended together, based on the velocity of the character (with respect to the direction it faces), but in practise, we only have to worry about a maximum of two animations at any moment. It works by defining a ‘characterspace direction’ in 2D for each animation to be blended - essentially we’re distributing animations around a 2D circle which is defined in the unrotated / identity space of the character - ie, relative to the direction that the character is facing.
My current idea goes something like this:
The character is moving with some linear velocity - a 3D vector.
Step number one is to transform that vector into the local space of the character, and drop the Y component, so we can think in terms of a 2D circle, on the XZ plane (and normalize it, so its just a 2D direction with unit length), and think in terms of trigonometry, where zero degrees is our Right vector, and ninety degrees is our Up vector.
Step two: without making assumptions about how many animations are involved?
We find the 2D dot product between the (transformed, 2D) velocity vector, and the direction associated with each animation. We capture the results in an array, and once we have all the dot values, we normalize the array, by dividing each value with the sum of all values. Note that if a dot value is negative, that animation is effectively disabled, and we set the value as zero. The remaining (positive, and normalized) dot values are the weights we should be applying to our animations.
I’m aware that this could be optimized by computing which Quadrant we’re working in, however that introduces a bunch of conditional logic, which is likely to cause the cpu to stall, as the compiler can’t optimize on branched logic. For a fistful of operations, it’s generally faster to avoid the branches, and simply perform operations that were not really necessary for the solution of the problem.
Anyone done any work in this area? I would love to hear your ideas / opinions!

Sinoid
See the Doom animation talk:
They’re quite clear on the animation. There were some older GDC animation talks about correction for foot sliding and root motion, basically boiled down to correct for the constant motion not correct to lock a root in place.
I’ve been trying out the quat based retargeting from DOOM and using jiggle bones on everything for naturalizing stilted-programmer-animation. Not quite there, but getting there,
Leith
I don’t plan to recreate GDC solutions, I plan to find the cheapest path that works for me. I don’t think that gdc is the right path, just because someone there said it - math has two altruisms, the direct path to the answer, and the shortcut to the answer
Leith
Today I fixed a bug in my foot-planting solution whereby the zombie was able to walk straight through static scenery. The fix involved two parts - first, I am careful to ignore the Y component of my error term, because I want the physics hull to look after changes of position in Y axis. This looked a lot better, but still not good enough.
Secondly, I needed to add a raycast to correct the resulting Y coordinate to account for the fact that my hull is a Capsule, not a box - the feet are not positioned neatly at the bottom of the capsule.
Now the zombie is able to roam “without foot slipping” across uneven terrain without sinking into it, floating above it, or any other weirdness. Results are “close to perfect”
The only current issue with the Zombie physics is that it’s using weak impulses to drive the character, which I deliberately have given a lot more mass than the Player - the result is that a slow moving zombie can’t climb gentle slopes, it needs to get some momentum happening to make it up a hill.
I’ll try switching to a force-based controller later today, and see if I can give the zombie some more “grunt”.
[EDIT] Switched to using Forces instead of Impulses - will take a bit of tweaking to get the values right, but there’s a lot more control, and no apparent problems with “hill-climbing”.
Leith
I have no root motion, and the walk cycle is not constant, not linear… In the case of my zombie, we don’t want constant motion - it’s limping, or staggering, and in this case, constant motion actually causes foot-slipping. Therefore, I use a constant (but shifting) frame of reference, being the world position of the planted foot, assuming that only one (or not any) foot is planted at any time. The frame of reference is shifting (not moving) at a rate dictated by the animation, not based on any constant. It’s actually working pretty nicely, though there are still some small teething issues to sort out.
Leith
Started working on blending locomotion animations (not using a proper blend tree, I’m using some switched logic and AnimationController layers).
First impressions are pretty bad - but the assets need some polish. My animations are not of equal length - it looks like Urho’s animationcontroller somehow compensates for this, because there’s no visual glitching occuring in the legs of my character, but there is some glitching in the arms and hands, which are further from the root node. I’ll start by making all my walk animations have the same play length, and see if that improves things at all. If all else fails, I can ask an artist for some diagonal walking animations.
Leith
Today I synchronized the play length of my four walk animations (for player character).
Previously, they had the following lengths:
WalkForwards = 40 frames
WalkBackwards = 30 frames
StrafeLeft = 45 frames
StrafeRight = 45 frames
I chose to make them all 45 frames in length.
In order to reduce the glitching that remained when blending / moving diagonally, I set the Weight of forward/backward to 0.7, and the Weight of left/right to 0.3
The only thing that’s stopping me from applying my “foot-planting” solution to the player character, is related to how I created the “strafe right” animation - it’s a mirror of “strafe left”, which means that the leading foot is not the same in those animations - I’ll need to cut and paste half of my keyframes in order to rectify that.
Rather than screw around with the playback speed of individual animations, I used Blender to adjust the play lengths of my animations… if anyone is interested in how to do that, feel free to ask me.
Leith
Work has begun on an improved ragdoll implementation.
The idea is to attach our ragdoll armature to our model on instantiation, with all the bodyparts set to Kinematic mode, so that they are driven by animations. If done correctly, we don’t care about the initial pose - bodyparts are instantianted in “bonespace”. I did not rotate these bodyparts! When it comes time to switch (some or all of) the armature to ragdoll mode, the bodyparts are already aligned to the skeletal armature. There are other advantages, too.
If this experiment works out well, I can probably afford to throw away the coarse outer collision hull entirely.
Leith
CreateRagdollPart(adjustNode, "RightUpLeg", ShapeType::SHAPE_CAPSULE, Vector3(0.2f, .45f, 0.0f),Vector3(0.0f, -0.2f, 0.0f), Quaternion::IDENTITY);
CreateRagdollPart(adjustNode, "RightLeg", ShapeType::SHAPE_CAPSULE, Vector3(0.2f, .45f, 0.0f),Vector3(0.0f, -0.2f, 0.0f), Quaternion::IDENTITY);
CreateRagdollPart(adjustNode, "LeftUpLeg", ShapeType::SHAPE_CAPSULE, Vector3(0.2f, .45f, 0.0f),Vector3(0.0f, -0.2f, 0.0f), Quaternion::IDENTITY);
CreateRagdollPart(adjustNode, "LeftLeg", ShapeType::SHAPE_CAPSULE, Vector3(0.2f, .45f, 0.0f),Vector3(0.0f, -0.2f, 0.0f), Quaternion::IDENTITY);
CreateRagdollPart(adjustNode, "RightArm", ShapeType::SHAPE_CAPSULE, Vector3(0.15f, .25f, 0.0f),Vector3(-0.15f, 0, 0), Quaternion(0,0,90)) ;
CreateRagdollPart(adjustNode, "RightForeArm",ShapeType::SHAPE_CAPSULE, Vector3(0.1f, .25f, 0.0f),Vector3(-0.15f, 0, 0), Quaternion(0,0,90)) ;
CreateRagdollPart(adjustNode, "LeftArm", ShapeType::SHAPE_CAPSULE, Vector3(0.15f, .25f, 0.0f),Vector3(0.15f, 0, 0), Quaternion(0,0,90)) ;
CreateRagdollPart(adjustNode, "LeftForeArm",ShapeType::SHAPE_CAPSULE, Vector3(0.1f, .25f, 0.0f),Vector3(0.15f, 0, 0), Quaternion(0,0,90)) ;I’m starting with a code-driven approach for testing and debug purposes, but as soon as I’m happy, I’ll shove this data into a file and load it per character, as I already do for animation lists.
Leith

At this point, I don’t even need physics constraints between bodyparts, so this armature is still incomplete, yet each bodypart is doing what it should - under kinematic mode, the bodypart constraints are already enforced without need for physics constraints.
Leith

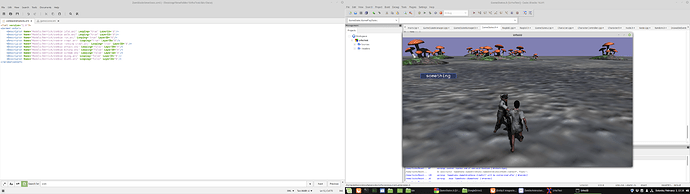
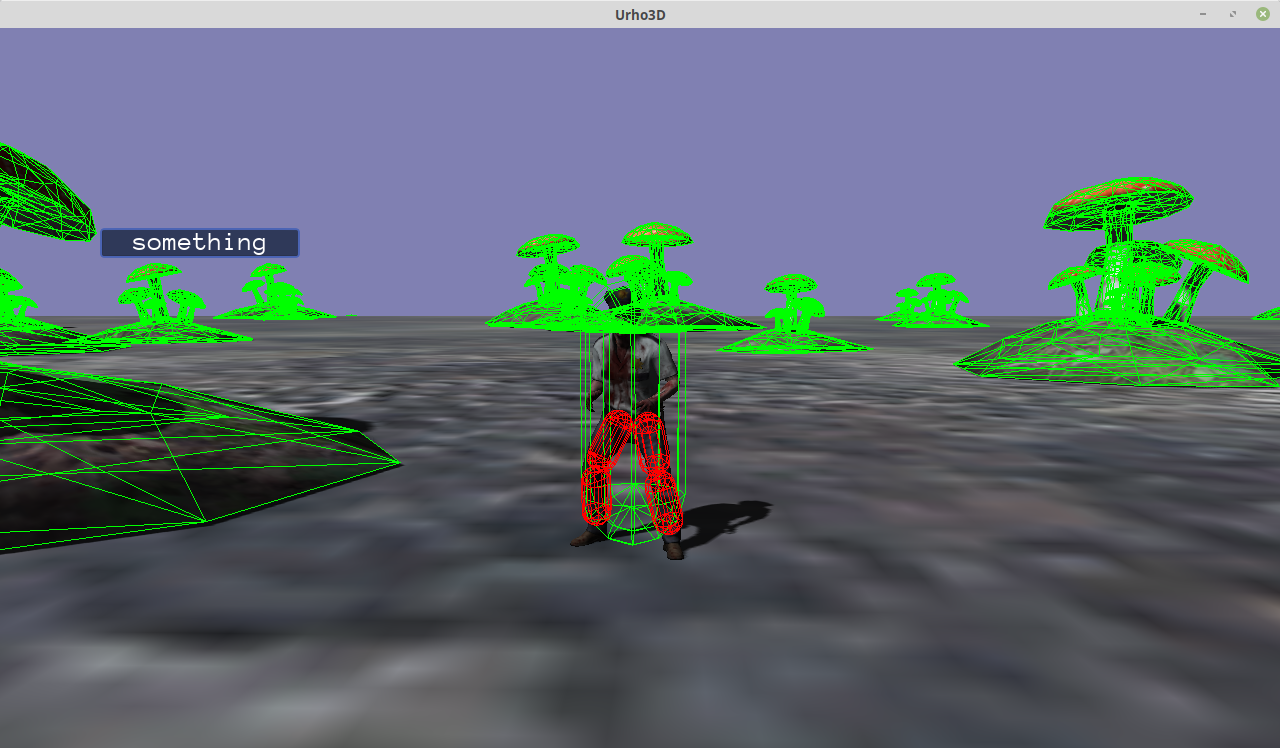
Armature is completed (but still unconstrained by joint constraints). Note that I have bodies on the Feet, I plan to experiment with using collision detection to trigger my footfalls, instead of the animation triggers currently used. This will allow the foot-planting solver to work intelligently with uneven terrain and obstacles such as rubble. Whether or not I’ll end up using IK as part of this solver is not yet decided.
The reason this character appears to step outside its outer bounding hull is because I don’t enable the foot-planting solver until the first footfall is detected.
Leith
CreateRagdollPart(adjustNode, "Hips", ShapeType::SHAPE_BOX, Vector3(0.30f, .15f, 0.2f), Vector3(0,0.05f,0), Quaternion::IDENTITY);
CreateRagdollPart(adjustNode, "Spine1", ShapeType::SHAPE_BOX, Vector3(0.35f, .35f, 0.25f),Vector3(0,0.1f,0), Quaternion::IDENTITY);
CreateRagdollPart(adjustNode, "Head", ShapeType::SHAPE_CAPSULE, Vector3(0.25f, .35f, 0.0f),Vector3(0, 0.125f, 0), Quaternion::IDENTITY) ;
CreateRagdollPart(adjustNode, "RightUpLeg", ShapeType::SHAPE_CAPSULE, Vector3(0.2f, .45f, 0.0f),Vector3(0.0f, -0.2f, 0.0f), Quaternion::IDENTITY);
CreateRagdollPart(adjustNode, "RightLeg", ShapeType::SHAPE_CAPSULE, Vector3(0.2f, .45f, 0.0f),Vector3(0.0f, -0.2f, 0.0f), Quaternion::IDENTITY);
CreateRagdollPart(adjustNode, "LeftUpLeg", ShapeType::SHAPE_CAPSULE, Vector3(0.2f, .45f, 0.0f),Vector3(0.0f, -0.2f, 0.0f), Quaternion::IDENTITY);
CreateRagdollPart(adjustNode, "LeftLeg", ShapeType::SHAPE_CAPSULE, Vector3(0.2f, .45f, 0.0f),Vector3(0.0f, -0.2f, 0.0f), Quaternion::IDENTITY);
CreateRagdollPart(adjustNode, "RightArm", ShapeType::SHAPE_CAPSULE, Vector3(0.15f, .25f, 0.0f),Vector3(-0.15f, 0, 0), Quaternion(0,0,90)) ;
CreateRagdollPart(adjustNode, "RightForeArm",ShapeType::SHAPE_CAPSULE, Vector3(0.1f, .25f, 0.0f),Vector3(-0.15f, 0, 0), Quaternion(0,0,90)) ;
CreateRagdollPart(adjustNode, "LeftArm", ShapeType::SHAPE_CAPSULE, Vector3(0.15f, .25f, 0.0f),Vector3(0.15f, 0, 0), Quaternion(0,0,90)) ;
CreateRagdollPart(adjustNode, "LeftForeArm",ShapeType::SHAPE_CAPSULE, Vector3(0.1f, .25f, 0.0f),Vector3(0.15f, 0, 0), Quaternion(0,0,90)) ;
CreateRagdollPart(adjustNode, "RightFoot", ShapeType::SHAPE_CAPSULE, Vector3(0.125f, .25f, 0.0f),Vector3( 0, -0.1f, -0.1f), Quaternion(90,0,0)) ;
CreateRagdollPart(adjustNode, "LeftFoot", ShapeType::SHAPE_CAPSULE, Vector3(0.125f, .25f, 0.0f),Vector3( 0, -0.1f, -0.1f), Quaternion(90,0,0)) ;I’ve found these values, for this one character, empirically. This sucks, I can’t be doing this on every zombie model. I need to find a way to automate it, and make it data-driven. I already load a custom xml file per character model for the purposes of getting a list of animation info that are tied to a hardcoded enumeration. I could just extend that custom file to include bodyparts.
Leith
Zombie can now detect when a foot touches the ground, and when it leaves the ground. I don’t need animation triggers to tell me, which bodes well for uneven terrain, and basic hill climbing/descent.
Looking forward to bringing in some new zombies and animations
Leith
Oh no, it appears that listening for start and end of collision is totally unreliable for the purpose of detecting footfalls! Here’s what happens at runtime:
When the zombie begins to walk, I detect that a foot is beginning to touch the ground. A mere few frames later, the physics step happens (again), and despite the fact that my foot bodies are kinematic (so it’s not about collision response), I’m told that the foot has left the ground again - which is simply untrue! That foot is still touching the ground, yet I am told that collision has ended!
I am just lost for words. I really expected this to work reliably. I’ll tweak some numbers, but I have a really bad feeling about how stable a solution this will yield.
I3DB
The collision EVENT ended, though the foot is on the ground.
Leith
I was under the impression that “collision ended” indicated that two colliding bodies have separated - if that is not the case, what exactly constitutes the “end of a collision event” ? I ask because several render frames and one physics step have passed between receipt of “collision start” and “collision end” events.
[EDIT]
I’ve just stared down the relevant code in PhysicsWorld.cpp and it appears that my assumption was correct: “collision end” is only sent when a collision that was collected in a previous physics step has ceased to exist, indicating that two colliding bodies have just separated. I’m going to debug-spew the world position of one of the feet, taking into account the radius on the foot body, just to double-check that my walk animation does not contain any translational glitch that would explain early detection of separation.
Leith
Tweaking the numbers did help, but now I have yet another new issue - the zombie walk cycle is almost a shuffle - the feet are only raised by a very small amount when walking.
The position of the pelvis is currently dictated by an outer physics hull. That hull is a dynamic body, and now I am fighting the “jitter” introduced by bullet’s collision response (impulse-based penetration correction). The numbers introduced by the “jitter” of a dynamic body in constant contact with the ground, are in the same order of magnitude as my “foot lift” maximum height, leading to erratic and unpredictable triggering of the start/end of collision events.
I’m going to need to slightly adjust my animation curves on the zombie walk cycle to defeat the “jitterbug”, by raising the foot more than the “skin thickness” that bullet applies during restitution.
[EDIT]
I’ve just read somewhere that the default skin thickness for bullet is set to 0.001 units : problem is, I am seeing jitter values that average more than ten times that much! I’m seeing values in the order of 0.01 to 0.02 - still very small numbers, but big compared to the raised foot height of a shuffling zombie.
Ah! I remember giving the zombie a mass of 10 (so the player can’t push the zombie around). That might explain a lot about the numbers I am seeing
[POST EDIT]
I’ve just hit up one of my 3D artist contacts to beg for some help to adjust the curves on the problem walk cycle. He does not owe me any favours, and I did not offer to pay for his time, so chances are high that I’ll end up doing it myself. Technical art is within my realm, but I am definitely not an artist.
Sinoid
You’re probably too deep into it for it to matter now, but Bullet has a PID example in the InverseDynamics section: https://github.com/bulletphysics/bullet3/tree/master/src/BulletInverseDynamics it’s a raw PID so it’s sort of sketchy with high-velocity and sudden stops, but a safe base.
I was under the impression that “collision ended” indicated that two colliding bodies have separated - if that is not the case, what exactly constitutes the “end of a collision event” ? I ask because several render frames and one physics step have passed between receipt of “collision start” and “collision end” events.
IIRC, bullet constructs the manifold over time/substeps, collision separation likely doesn’t occur until the active manifold no longer contains a point sourced from the respective other object.
There is a check in PhysicsWorld in Urho3D for the number of contacts to minimize that, but it can only be as reliable as Bullet is. If you really care about accuracy, you’re going to have to use a ghost-object/query to find it on demand.
Leith
I don’t really care that much about accuracy. All my current problems stem from the fact that the zombie walk is almost a shuffle, and so contact make and break is not reliable. Today I enabled IK, and now the feet of my zombie are spinning around wildly  Gah.
Gah.
Modanung
Maybe you forgot a minus or transform space conversion?
Leith
I have attached the ik to descaling nodes under the respective joints - this is probably playing hell with two-bone ik solver trying to ascertain parents, but otherwise its basically cut and pasted from the sample
[EDIT]
Yeah it definitely appears to me that my “descaling nodes” are the source of the problems with foot IK.
My model was 100x too big (fbx unit bug in assimp), so I added a scaling node near the root to make it 100x smaller. This presented a problem when I wanted to attach rigidbodies to the skeleton - Urho3D automatically sets the local scale of collision shapes to the inherited scale of the parent node. So to counter that, and rather than make my physics armature 100 bigger to compensate, I injected “descaling” nodes attached to the skeleton, and then attached my rigidbodies (and ik elements) to the descaling nodes. These “false bones” are taken into account by the ik solver as being part of the ik chain(s), causing strange results.
At this point I am seriously tempted to extend AssetImporter with an optional scaling feature, which applies a user-defined scale to all vertex and bone positions, because I think that solution is preferable to having to manually rescale all my assets in Blender or Maya, due to the promise of batch-execution.
Leith
Having fixed up the zombie asset scale in blender, I am now getting “crazy legs” due to foot IK, so I probably somehow didnt scale bone positions in animations or something - I’m a Maya guy, trying to learn blender rapidly
Leith
The “crazy-legs” bug has been resolved - I now have a walking zombie, with a foot-slipping solver, and leg ik is working too! I just made my zombie walk with one foot on a slope, and the other on flat ground, and found that my foot-slipping solver works perfectly in conjunction with foot ik!
I’ll post a video soon-ish, feeling kinda burned from three days of debugging physics issues.
Leith
https://www.dropbox.com/s/qzuo1wcyzylyvbz/FootSlipping.mp4?dl=0
There’s a problem with the foot ik orientation, but otherwise, everythings working as expected
I3DB
Do you use functions such as SetRotationSilent to help the character or zombie make turns without jumpiness?
Leith
No - a fun side-effect of my “foot-planting” solution allows the walking zombie to “pivot” on the planted foot while turning - it looks quite smooth and natural.
Without talking about how I detect footfalls, here is the code I am using to prevent foot-slipping.
The reason that the zombie appears to pivot on the planted foot is because I am teleporting the character’s worldspace position such that the planted foot remains planted, thus any simultaneous rotation of the body is compensated for.
void Character::HandleFootSlipping(){
if(rightFoot_)
{
auto* phyWorld = node_->GetScene()->GetComponent<PhysicsWorld>();
Vector3 leftFootPosition = leftFoot_->GetWorldPosition();
Vector3 rightFootPosition = rightFoot_->GetWorldPosition();
// Cast ray down to get the normal of the underlying surface
PhysicsRaycastResult result;
if(rightFootPlanted){
phyWorld->RaycastSingle(result, Ray(rightFootPosition + Vector3(0, 1, 0), Vector3(0, -1, 0)), 3.0f, CollisionFilter::Static);
if (result.body_)
rightFootPosition = result.position_;
RigidBody* rb = node_->GetComponent<RigidBody>();
Vector3 slippedPos = rightFootPosition - FootPlantedPosition;
slippedPos.y_=0; /// Deliberately ignore error in Y : respect the physics hull!
Vector3 bodyPos = node_->GetWorldPosition();
Vector3 newPos = (bodyPos - slippedPos);
node_->SetWorldPosition( newPos );
}else if(leftFootPlanted){
phyWorld->RaycastSingle(result, Ray(leftFootPosition + Vector3(0, 1, 0), Vector3(0, -1, 0)), 3.0f, CollisionFilter::Static);
if (result.body_)
leftFootPosition = result.position_;
RigidBody* rb = node_->GetComponent<RigidBody>();
Vector3 slippedPos = leftFootPosition - FootPlantedPosition;
slippedPos.y_=0;
Vector3 bodyPos = node_->GetWorldPosition();
Vector3 newPos = (bodyPos - slippedPos);
node_->SetWorldPosition( newPos );
}
}
}
My current issue is that the “foot ik” is forcing the orientation of the zombie’s feet (and legs, and hips apparently) to all face in the world-z direction that was set up prior to attaching the ik elements. That is to say, the ik solver is being solved in worldspace, and not respecting the fact that I have rotated the entire character around the world Y axis!
When the player character walks up behind a zombie who is facing away from player, the zombie turns around and begins walking toward the player, but its feet (and the rest of the ik chains) remain oriented in the original direction, so now the feet are backwards, and the legs are twisted.
Here’s what the IK effector setup looks like (per foot):
leftEffector_ = leftFoot_->CreateComponent<IKEffector>();
leftEffector_->SetChainLength(2);
leftEffector_->SetINHERIT_PARENT_ROTATION(true);and here’s what the ik solver setup looks like:
bone = skel.GetBone("Hips");
if(bone!=nullptr && leftFoot_!=nullptr && rightFoot_!=nullptr)
{
Node* hips = bone->node_;//->GetChild("Descaling_Hips");
solver_ = hips->CreateComponent<IKSolver>();
// Two-bone solver is more efficient and more stable than FABRIK (but only
// works for two bones, obviously).
solver_->SetAlgorithm(IKSolver::TWO_BONE);
// Disable auto-solving, which means we need to call Solve() manually
solver_->SetFeature(IKSolver::AUTO_SOLVE, false);
solver_->SetFeature(IKSolver::JOINT_ROTATIONS, true); // Character is skinned
solver_->SetFeature(IKSolver::TARGET_ROTATIONS, false); // Don't align to target orientation
solver_->SetFeature(IKSolver::USE_ORIGINAL_POSE, false); // Don't use original pose
solver_->SetFeature(IKSolver::UPDATE_ACTIVE_POSE, true); // Do update animated poseI enabled “Inherit Parent Rotation” on effectors for the following reason:
But it seems to be not doing anything
Can anyone give me some guidance on how to make the ik solver respect the orientation of the character to which it is attached?
Leith
I’ve solved all my foot-ik issues.
In my case, I needed to disable both joint and target rotations.
The following quote taken from Urho documentation apparently is not true for my use-case:
Urho documentation says that disabling joint rotations on skinned characters “will look wrong” - but I handle foot orientation myself (to align feet to slopes) as per the ik sample.
Looking good 


[EDIT]
Hmm, that first screenshot does look weird - I may need to do more work on this issue, I’d love to hear from anyone who has dealt with the issue - we want the ik solver to apply rotations in character space, and also to specifically omit the bones where the end-effectors are attached.
Leith
I’m in a jam.
With JOINT_ROTATIONS disabled, the character’s foot orientation is coming from the bone animation, and looks correct, but the legs of the character are distorted at the knee.
With JOINT_ROTATIONS enabled, the knee looks correct, but the feet are oriented in a fixed worldspace direction, and when the character rotates 180 degrees in Y, the feet are backwards, the ik chains remain relative to worldspace so the body is contorted from the hips down.
I can’t seem to find a combination of settings that lets the ik solver apply joint rotations correctly on a bone-animated skinned character. Somehow, I need to inform the solver root node to inherit the orientation of the character, not to operate in worldspace but to operate in characterspace.
I guess I am running out of options, the only thing I haven’t tried is ik target orientation. I guess I could compute the orientation of the target, but it seems like overkill, and likely I’ll lose the animated orientation of the raised foot (which flops around adorably). I was hoping not to have to solve foot orientation as part of the ik solver. Love to hear from you guys about it.
I3DB
My view of zombies and kinetics is stilted … I mean why mess around with lots of details when you can do it in one slap?


Leith
Eventually, I did find settings for foot ik that work on an animated skinned mesh that has a dynamic physics controller.
solver_->SetFeature(IKSolver::JOINT_ROTATIONS, true); // Character is skinned - we care about rotations
solver_->SetFeature(IKSolver::TARGET_ROTATIONS, false); // Don't align to target orientation
solver_->SetFeature(IKSolver::USE_ORIGINAL_POSE, false); // Don't use original pose
solver_->SetFeature(IKSolver::UPDATE_ACTIVE_POSE, true); // Do update animated pose
solver_->SetFeature(IKSolver::UPDATE_ORIGINAL_POSE, true); // Do apply the solution to the original poseThat last one was required to ensure that the ik solver respected the orientation of the character when JOINT_ROTATIONS is enabled I truly hope that this information is useful to anyone who attempts to deal with a similar scenario - the ik sample does not use these settings, but then again, that character never moves or rotates.
Leith
My player character derives from the same class as non player characters (well, not quite derives from, there’s currently an isPlayer flag, and some switchcase logic, though I plan to derive soon) - I’ve now applied all this foot-ik and foot-slipping stuff to the player character, who has more locomotion animations than the zombies.
It’s a bit twitchy sometimes, and the feet appear to be bent too much on some slopes, but I have not yet tweaked the ik settings (they are default values), or closely examined the foot orientation stuff.
I’ve got two outstanding issues at the moment - walking downhill looks wrong because the character outer hull prevents the front foot from reaching the ground (I think I can tackle this one easily enough), and the animations for walking forwards and strafing sideways are incompatible - they have the same length, but the footfalls are not on the same keys, so blending them leads to bad-looking results.
Manually cutting and pasting a few keys should bring my animations into synch, and moving the outer hull down to satisfy the lower foot should let the leading foot reach the ground when travelling downhill / walking down steps.
I’m tempted to remove the outer hull altogether, in favour of ragdoll bodypart hulls - but that turned out to be a bad idea in terms of detecting footfalls on a staggering (shuffling) zombie, as it was difficult to tune the foot bodies for clean make-and-break with a level surface, let alone uneven terrain.
Leith
Insight from the work of others:
Here’s how I plan to deal with walking “downhill”.
Anytime in our walk cycle, we can measure the height of the ‘unplanted’ foot with respect to a theoretical level plane (lets call it A - in my drawing its zero, so I don’t show it). We can also measure the height from that plane to the terrain surface - this is our error term, B (shown in red).
We want to move the root of our character DOWN, such that the height from the terrain to the unplanted foot equals A (I believe this is simply pelvis Y - B, plus accounting for the foot offset, since the foot bone is really the ankle, and is never equal to the plane Y). We want to do this immediately after animation is applied, but before IK is applied. The result should be that the unplanted foot has height A above the terrain, and the planted foot, and its leg, bend further to make that happen.
The proposed solution was borrowed from Unreal engine.
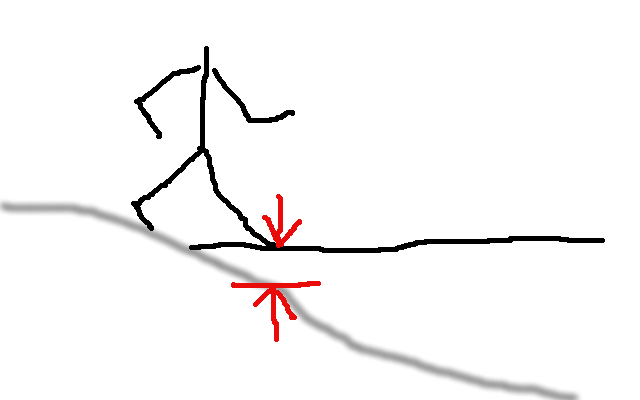
Super sorry for my terrible coder art, but the final result from the proposed solution would be something like this golden thing: (noting, I don’t think we need to lean forward and backward at this stage)
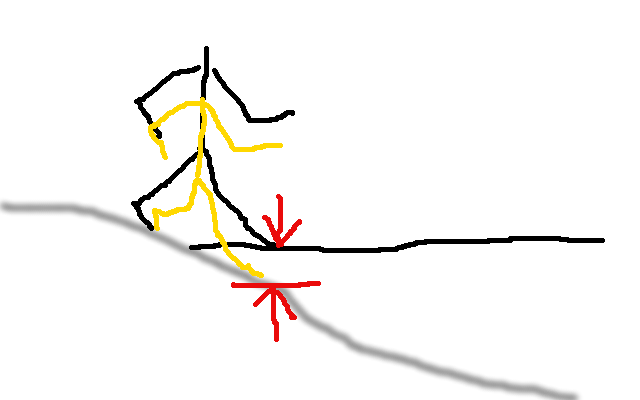
This solution violates the length of a single step in the walk cycle with respect to the animation, but I suspect my foot-planting solution will compensate somewhat for the error, and IK solver will at least try hard to do the rest. Essentially, we will take longer steps when moving downhill, as we already take shorter steps when moving uphill - the animation speed is already tied to the velocity of the hull, and it all should “just work” - maybe.
The foot-planting solver is tied to the animation speed, and adjusts the velocity of the hull (through sheer position teleport) to tie in with footfall triggers in the animations. It effectively “post-empts” the velocity of the hull, and compensates for weirdness in walk cycles. I’m sort of crossing my fingers, but in my engineers mind, there are two levels of compensation on top of basic dynamics, it might just work (on slopes or stairs that climb by a max of 30 degrees per step)
I’ve not needed target orientation for orienting feet so far, and trying hard to resist predicting footfalls (like some other solutions do) as I don’t want to analyze animation keys unless I have absolutely run out of options. I don’t need perfect accuracy, just fluid motion.
Leith
I’d like someone to doublecheck my logic before I code this up, perhaps it can be optimized.
Modanung
I wonder how this approach will work on steep slopes, stairs and cliff edges.
Leith
It should work well on slopes of (+/-) 30 degrees or less, and stairs, and obstacles, where the “rise over run” is 30 or less. I expect it to work terribly on slopes of 45 or more degrees (which we typically can’t climb with a dynamic controller) - but the typical “rise” on staircases happens to be 30 deg.
It won’t work for cliffs  It won’t work for Quadrupeds, or for spiders, although I am certain that a similar algorithm could be evolved that can cope with more than two feet (Final IK for Unity manages to do so, therefore it can be done).
It won’t work for Quadrupeds, or for spiders, although I am certain that a similar algorithm could be evolved that can cope with more than two feet (Final IK for Unity manages to do so, therefore it can be done).
I did mention, this technique is not mine - my description of the technique is all I can lay claim to, this stuff was based on a solution that ships with the Unreal engine, and is described somewhat in the documentation.
Also, I expect to have to modify the existing foot ik logic, which makes assumptions about where we want to plant the ik targets for the feet, but I expect that to be trivial, and indeed, I expect to marry the proposed and existing code to eliminate redundant raycasts (my foot-slipping solution runs just after the foot ik solver, and requires a ray be cast from each foot, so I already have something to eliminate in the name of efficiency).
Finally, I have a gut feeling that I’m going to need to execute the IK Solver twice, to deal with the fact that the unplanted foot becomes unplanted when it is leaving the ground, which on a theoretical plane, sets it inside the terrain on a downhill slope.
I hope to take advantage of the foot-planting positions to avoid that, by remembering not just where the current planted foot is, but where the previous planted foot was. I may need to start using more than two keys on my animation triggers (Unreal uses four). The algo as presented will likely be refined. Etc.
Leith
I disable the foot IK stuff when jumping - in debug it looks very funny to see the IK legs stuck to the ground while the character and its physics body (or bodies) are jumping. Falling is equivalent to jumping, if I have to deal with cliffs, and my character is not a spider, I should be ok - maybe.
Leith
One issue with the primitive collision hull (character capsule), due to my foot-planting solution, is that its fairly easy to teleport through solid walls. Effectively, I am teleporting the hull to compensate for the planted foot. CCD could help here. I remember bugs in Star Wars : Battlefront (the first one) that could be explained by this. There were quite a few. (One of my teachers, during my bachelor degree, worked on KOTOR, and Sims 3, he had plenty to say about bugs and deadlines).
I am sorely tempted to eliminate the character hull in favour of potential ragdoll bodypart hulls, and discounting the extra processing cost in terms of “hey, I know what bodypart I hit, I can do a partial ragdoll on that”
I3DB
Seems like a lot of coding for a minimal outcome. Or perhaps I’m not seeing the value of going through that code logic to upturn or downturn a foot.
Can’t normals be compared to figure rotation and then be done and go on?
What happens if someone slaps the zombie? Does it’s head turn round? Shoulders react? The full body goes ragdoll (as per the sample by removing physics and collision shapes and adding bones and constraints)?
Just wondering if there isn’t an easier approach that works. Applying forces to a ragdoll body appears already fluid and realistic. (with forces, you can cook the zombie with one slap and sprinkle on some angular torque for some sweet eye candy).
Leith
All that code is just needed for downhill locomotion, to pull the outer collision capsule (or just the character root) downwards enough such that the front foot can reach the ground!
Without it, the collision hull prevents the foot ik from being able to reach down lower than the horizontal plane that the walk animation was designed for.
Uphill locomotion I’m not worried about - the capsule does all the work of positioning the character with satisfactory results (the error is too small to worry about) but downhill looks very wrong when the leading foot can not reach the ground. This is most evident when the character is placed such that one foot is standing on a raised ledge, and the other is perched in mid-air, while it rightly should be much lower.
Currently I have no reaction when the zombie is hit - I was thinking of using some additive blending of canned “twitch” animations, rather than full-body ik. I have implemented code for “partial ragdolls” to simulate broken limbs, but I’m going to need a few more animations before I can finish that stuff - what happens if we break both the legs?
Unlike the sample, I don’t remove hull physics and add the ragdoll bodyparts/constraints at the last moment - I create the ragdoll bodyparts during initialization, leave them unconstrained, and put them into “kinematic mode” so they are animated along with the skinmesh - this lets me determine at runtime exactly which bodypart was hit.
For partial ragdoll, I switch all bodies on a bone chain from kinematic to constrained dynamic mode, so that chain is now in ragdoll mode, but the rest of the skeleton is still animated.
I3DB
Ok, but why not just rotate the zombie so even on a downhill slope the zombie shape is rotated so the traversed surface remains horizontal for locomotion across it? Meaning a 45 degree incline being traversed will incline the zombie 45 degrees also.
Alternatively, assuming the zombie should remain precisely vertical at all times so the depth of each step might be less or more than the depth of the previous step, based upon some rotation of the normal of the surface underneath it at that point in time.
In such case the depth of the step is only a function of the normal of the surface (or terrain) being traversed. This can work for some inclines, certain for those of minimally inclining terrain.
In treating the zombie as a body of many parts, the depth of the step changing then causes other changes throughout the zombie body, where you mention things like the hips being affected.
And yet it would seem the rotation can be applied only to the foot of the zombie for some terrain inclinations and not have to involve IK. As the inclination increases, the zombie might just start sliding rather than walking.
What am I saying?
-
So much logic and coding, and I’m not sure just what it achieves of lasting value. Is the code re-useable for other actions of the zombie? If you get the step perfect, can that same code be applied to other actions or reactions of the zombie (for instance, when it gets slapped, or some other envisioned motion or movement of the zombie)?
-
Are there other and much simpler ways to get most of what you’re trying to do? Is implementing IK the most important piece of this puzzle you’re solving, or is getting the zombie to appear to step properly when examined closely to primary goal?
-
Are you majoring in IK, when you should be minoring in it? Is IK really needed at all?
You admit this is just a rewrite of some approach used by Unreal. It might not be a viable approach, just one used for some specific reason rather than a generally applicable and workable approach.
If so, I get a gut feeling the overall approach to solving this could be simplified by doing something else once.
When I’m walking uphill or downhill it’s difficult and causes my body to do ‘unnatural’ motions which vary depending upon the slipperiness and incline amount. Trying to code up these ‘unnatural’ motions causes a lot of guessing and assumption making. If I drag a leg and try to walk uphill or downhill, it’s quite a brain teaser at times.
Leith
Thanks to some clarification about two particular lines of source in the IK Sample, I’ve been able to head down a completely different path to solving the same issue - which is the need to drag downwards the character when walking downhill.
Currently, I begin by computing the positions of the foot IK effectors as per the sample.
But before I execute the IKSolver, I examine the positions of the foot effectors I’ve just computed, I transform them into local character space so I can tell which foot is in front of the other, and I am able to then determine if the character is trying to walk downhill or uphill.
If walking downhill, I can now compute an error term (in Y) for the unplanted and leading foot (indicating that the unplanted foot has crossed over in front of the planted foot), and apply it to the root node. I’m not done with the implementation - it’s both incomplete, and sub-optimal, but early tests look good.
/// Note the worldspace position of each foot-effector
Vector3 leftEffectorPos = leftEffector_ ->GetTargetPosition();
Vector3 rightEffectorPos = rightEffector_->GetTargetPosition();
/// Note the worldspace Y coordinate of each foot-effector
float leftEffectorHeight = leftEffectorPos.y_;
float rightEffectorHeight = rightEffectorPos.y_;
/// Transform the effector positions from worldspace to local space of character
Vector3 lel = node_->WorldToLocal(leftEffectorPos);
Vector3 rel = node_->WorldToLocal(rightEffectorPos);
/// If right foot is planted, and left foot is "in front" and is lower than right foot
/// ie the left foot has "crossed" in front of planted right foot, and we're heading downhill
if( rightFootPlanted && lel.z_>rel.z_ && lt < rt+0.1f)
{
std::cout << "breaktime :z = " << lel.z_ <<","<< rel.z_ << " and y=" << lel.y_<<","<<rel.y_<<std::endl;
}
/// ELSE
/// If left foot is planted, and right foot is "in front" and is lower than right foot
/// ie the right foot has "crossed" in front of planted left foot, and we're heading downhill
else if( leftFootPlanted && rel.z_>lel.z_ && lt > rt+0.1f)
{
std::cout << "breaktime :z = " << lel.z_ <<","<< rel.z_ << " and y=" << lel.y_<<","<<rel.y_<<std::endl;
}Obviously this is not production quality code - I like to get things working, then optimize them.
Leith
IK is usually cheaper and generally more accurate than prediction on undulating terrain - I did try not to use IK, but in the end I had to decide between IK (which uses an iterative solver) and prediction (which is generally more prone to error given little to no local knowledge of the geometries, given the absence of a navmesh or even a butterfly mesh). I did not want to create a solution that was based on an assumption that the walk cycle was a linear, regular walk. IK seemed like the best option, in combination with animation on uncertain terrain.
Leith
Why not rotate the zombie?
Unreal’s solution does lean the character a little (forwards, on uphill, and backwards, on downhill, counter to the surface normal) when walking up or down slopes.
I think this is accurate, as we need to compensate our center of mass when tackling a slope.
But the amount of rotation is small - it does not follow the surface normal per se - in fact, the direction of the lean rotation is the reflection angle, ie, counter to the normal. So far, I don’t bother implementing it, I’m restricting myself to foot solving until I am satisfied with the results in all corner cases.
It would look silly to see a character rotated to 30 degrees on a 30 degree slope - the center of mass would be way off.
Leith
Current solution involves dragging down the root node of the character to match the height of the unplanted foot’s effector - when it has crossed ankles ahead of the planted foot’s ik-effector, when the effector for the unplanted foot is lower in height (ie we are walking downhill).
That is an incomplete solution, and appears to generate some jitter due to penetration correction of a dynamic hull, but generally seems to work, and indicates I am moving in the right direction.
Effectively, I move the entire character root down to match the height of the effector on the unplanted, leading foot. I let the IK solver deal with the fallout from doing so, but I know that the leading foot can at least reach the ground, minus its animated height.
After doing all that, I go on to apply the foot-slipping solver, which corrects the torso XZ position, but ignores the Y position correction we made, such that the character root is teleported in XZ to satisfy the planted foot remaining where it was planted.
The order of operations is in question - everything is in question - but it’s getting closer to decent.
Man, I am so tempted to get rid of the dynamic hull, but its good for certain things, and I already control animation speed / footfalls / footslipping based on the velocity of the hull in a dynamic world, looking for a way out
Leith
The camera has no lerp, so its flickery when we teleport the root of the model it points at, but at least heres some content, with downhill correction looking reasonable
<https://www.dropbox.com/s/qzuo1wcyzylyvbz/FootSlipping.mp4?dl=0 />
Leith
Zombie is now loading all Ragdoll information from its “Character Descriptor” xml file.
I use these custom xml files to “describe” my characters - they contain details for all the character’s animations, the names of important bones for Foot IK, ragdoll bodypart descriptors, and joint constraint descriptors, everything required to create a full ragdoll specific to that character. This makes my character class “data-driven” instead of “completely hardcoded and derived per character type”.
When I instantiate a ragdoll in “kinematic mode”, it perfectly follows the animations applied to the skeleton - problem is though, Bullet does not look for collisions between kinematic bodies, so it looks like a bad choice for detecting where the zombie was hit by, say, a kinematic sword in the kinematic hand of the player character.
I really need to use dynamic bodies - but tie them to the animated skeleton, disregarding Bullet dynamics while manually animating the RigidBodies.
Erwin suggests that I should be measuring the “stress” at the joint constraints, and using the resulting velocities to drive motors on the joints. I think that sounds needlessly complex?
I guess I am reaching the point where I have to reach out further than this community, but I thought it might be worth asking before I dig myself into a new hole.
Leith
I found a slightly improved algorithm for “pulling down” the root node - simply put, we move it to the animated height of the lower foot (while accounting for the bindpose foot offset) from character root.
Anytime in the walk cycle, this is true. No matter which direction we are moving, or on what slope.
Will implement shortly, I was side-tracked slightly by another issue.
Leith
Today I performed a technical fix on my “strafe right” animation.
I had scaled the length of my four cardinal walking animations to be the same (45 frames).
When walking forwards, backwards, or left-strafing, the animations were generally in agreement - the left foot would fall first, and roughly on the same keyframe, and later the right foot, again roughly on the same keyframe.
But the right-strafing animation had been created as a mirror of the left-strafe animation. So it began on the right foot, and although I could still set up animation triggers on the footfalls, the animation itself was unsuitable for blending with forward and backward animations to create eight cardinal directions (four pure animations, and four blended “diagonal” animations).
I used blender to cut and paste half of the animation keys on the right-strafe animation, so that the left foot was the first to move.
Now I tested my changes - animation blending is still very twitchy and unsatifying - the walk cycles are just too different to be blended as such. I am not blaming urho’s blending implementation, but I am seeing random flickering during advancement of two blended walks of equal length, and whose footfalls occur at or near the same frame, with the left foot leading in all animations.
I’ll need to create some diagonal walk animations to suit myself, based on baking the existing ones in blender. This will give me eight cardinal direction animations, and potentially, 16 that blend more nicely.
I’m also starting to experiment with script objects - hotloading scripts is a lot cooler than rebuilding the app, and scripted classes can be promoted to c++ based on their runtime cost/benefit ratio
Leith
// Experimental:.. try to use pre and post physics events to deal with constraining dynamic bodies to animated skeleton
SubscribeToEvent( E_PHYSICSPRESTEP, URHO3D_HANDLER(Character, HandlePrePhysicsUpdate ));
SubscribeToEvent( E_PHYSICSPOSTSTEP, URHO3D_HANDLER(Character, HandlePostPhysicsUpdate));Essentially, I want to animate a constrained set of dynamic bodies: I want the bodies to derive their momentum from the animation. The main problem with that idea, is that in Urho, animation controllers are one of the last things to get updated in a frame.
When bodies are kinematic, Bullet will ask Urho RigidBody for their world transform (via motionstate interface), but when they are dynamic, Bullet will attempt to drive their node transforms (again, via motionstate), which indicates that, for dynamic bodies, I should at least wait until after the physics has updated… Well, I tried that, and it didn’t appear to work as expected, so I’ll take some more time to trace values and then do some head-scratching based on the empirical data.
Leith
Today, I managed to constrain dynamic bodies to the bones of an animated character.
The result is a little bit shaky, but acceptable, given that competing systems are attempting to adjust the same scene nodes.
The way I achieved this, was to listen for the “post-physics update” event, which tells me that Bullet has just finished messing with my rigidbodies, at which point I call this method:
void Character::copyModelStateToRagdoll()
{
for (int i = 0; i < ragdollParts_.Size(); ++i)
{
ragdollParts_[i]->SetTransform( Vector3(0,0,0), Quaternion(1,0,0,0));
RigidBody* body = ragdollParts_[i]->GetComponent<RigidBody>();
body->SetAngularVelocity(Vector3::ZERO);
body->SetLinearVelocity(Vector3::ZERO);
body->ResetForces();
}
}Note that I connect my rigidbodies not directly to the bone nodes, but to a child node of each bone node, which I call “descaling nodes” (this particular model has not been correctly scaled, one of the nodes near the root introduces a scale factor that needs to be “cancelled” prior to attaching anything to the rig).
The above method forces the local transform of the rigidbody parent nodes to identity, such that they directly inherit the world transform of the bone nodes. This causes the dynamic rigidbodies to follow the animations applied to the bones - not as smoothly as kinematic bodies, but given the advantages of dynamic bodies over kinematic ones, I’ll call it a win
Perhaps I’ll upload a video later today, which shows the “shaky but acceptable” results of my efforts.
[Edit]
Oh - I should mention that I’m also creating my ragdoll constraints upfront, and have discovered that the constraint resolver is entirely responsible for the “noise” in the body transforms - I simply need to disable my constraints until I need them, or add them when I need them. For now, I chose to create them upfront, but disable them. They exist, but they are not active.
At this stage, I am ready to try to implement partial ragdolls
Leith
I’m uploading a short video of “Animated Dynamic Ragdoll” (applied to Zombie) which also implements “foot-planting” and “foot-ik”. The player character currently has no ragdoll, but does have everything else.
https://www.dropbox.com/s/mkqfdv6q5g6s6lj/DynamicRagdoll.mp4?dl=0
Currently, I zero out all velocity (and force) when I teleport the dynamic bodies to match the animated pose, but I intend to deliberately omit that step for bodyparts that are “in ragdoll mode”. At the moment that a bodypart enters “ragdoll mode”, it should inherit the velocity (and implied forces) that are due to the animation. This should result in a “clean handover” from animated mode to ragdoll mode, with the ragdoll dynamics “continuing” from the last known animated pose.
Leith
My next step is to process my “jump” animation, to get rid of that nasty old root motion.
I wish that our export toolchain could just optionally do that.
I use a Dynamic character controller scheme, so I don’t want root motion - I provide it, while synchronizing the animation speed. This gives me a lot more control over a character on uncertain terrain, and although it is harder to do and harder to get right than a purely kinematic solution, it is more plausible on uncertain terrain than pure kinematic solutions. It can adapt, within a margin of error.
Leith
Today I added a “falling” animation, and some logic to deal with that.
Somewhere I missed a logic bug, because the results were not as expected.
Time to remap and verify my logic.
Leith
Today I decided to set aside my Dynamic Character controller, and began experimenting with a Kinematic Character controller. To be honest, there’s a lot NOT to love about kinematic objects with respect to Bullet physics, but I always explore my options before choosing what feels right for any particular game.
The dynamic controller used dynamic velocity to adjust the playback speed of locomotion animations, which were devoid of root motion.
The kinematic controller will be taking a very different approach: animations will contain root motions, and I’ll be using them to drive the kinematics, so that the “feel” that the animators gave to character animations are not lost to the physics engine. I hope to solve foot-slipping “for free”, while still applying foot-ik. Animation playback speed will determine motion speed, and not the other way around.
For now, I’m basing my work on that of 1vanK, who provided us with a small wrapper around btKinematicCharacterController, but I’m quite willing to derive from the Bullet class, or even write a proxy based on it, depending on how things turn out… if this works out as I hope, I’ll implement the resulting class as a physics component of Urho3D, and issue a PR.
Leith
The main difference between my new kinematic controller, and the original (by 1vanK) is that I don’t want to use keyboard input to drive kinematics - instead, I will be using keyboard input ONLY to play animations (containing root motions), and extracting kinematic motion information from the animated model’s node… this will present a small challenge, since animation and physics updates are asynchronous, and in those frames where both events fire, the order of execution is not ideal - my physics update will only have access to the results of the previous frame’s animated state, and I’ll need to track animated state changes inbetween physics frames… this could make life interesting 
What I’m pointing out, and please correct me if I am wrong, well, it’s that Animation is pretty much the last thing that happens in a frame update - and assuming that physics runs at a lower framerate (as we would expect, given we can interpolate it for rendering) then in those frames where physics update does fire, it fires before animation is updated. Therefore, we can’t apply the results of animation for the current frame to the physics state - we’re always going to have a situation where the physics state is representing the previous animation frame. In this modern age of graphics hardware, I expect that the update/render framerate is always higher than the physics update. Currently I get around 600 FPS (vsync disabled) versus the fixed rate for physics at 30fps. I like to unlock vsync during development, so I can budget my “spend” and quickly notice any serious issues that I have inadvertently, and recently, introduced… if I add a bottleneck by accident, I detect it almost immediately.
Leith
Now I have the new character controller implemented, I am extending it to deal with animations - this is where the fun begins for me. One of the first issues relates to non-looping animations.
So far, I’ve concentrated a lot on “locomotion”, and the animations that drive it. Walking/Running in any direction is always a Looping animation. But Jumping usually is not a looping animation.
That’s all ok, until you hold down the jump button, and expect to be able to jump again!
The character will jump, but its animation is frozen in time at the end of the keyframes, and remains so until you change animations  Calling Stop on the animation is not enough to fix it. And we can’t remove the animationstate from the controller, because the remove method is private.
Calling Stop on the animation is not enough to fix it. And we can’t remove the animationstate from the controller, because the remove method is private.
I tried a few different ways to kill off that animation state from its controller, but failed so far to find a way around this.
Leith
The most major change when switching to kinematic player controller is the lack of friction - movement feels very “plastic”, and it stops immediately when you released controls - and it seems like I’ll have to hack in some basic friction and drag model. I’m working with btPairCachingGhostObject under the hood, it has some advantages in terms of optimizing collision queries, but doesn’t impose dynamics.
Leith
With respect to detecting root motion, my jump animation has a problem - the animator decided not to animate the model root node to control the hips, they instead chose to animate the hips directly.
I’ve asked for help with a workflow for fixing the technical art, but I am already thinking that I can just control this stuff in code, driven by data from my per-character xml animation set information
For each character model, I look for an xml file named after the character model, which contains information about the available animations, the names of some important bones for ik, and so on.
Leith
I added some more locomotion animations to the kinematic controller today, but they’re just the old ones, devoid of root motion - I just wanted to get this new controller to about the same state as the old dynamic one before I go changing things too much.
It turns out that detecting root motion derived from animation is non-trivial.
Artists are meant to animate the root bone - but sometimes they don’t.
Leith
https://www.dropbox.com/s/xt5zvl4iylu83ip/WIP.mp4?dl=0
Player is using a basic kinematic character controller, with no fancy foot-ik or other bells and whistles.
Animations are devoid of root-motion, except for the jump animation, which annoyingly applies animation to the translation of the hips, not the root node. No fix yet implemented.
Zombie is using a dynamic character controller, with fancy foot ik, foot-slipping and stepdown solvers, and pseudo-kinematic physics rig, where dynamic bodies are teleported according to animations, such that they retain their last known momentum when “released” into ragdoll mode.
Leith
Today I met AnimationController’s IsAtEnd method. This goes part of the way to breaking the ice with respect to non-looping animations in a clamped condition!
/// If our Character is "Airborn"
if(!bulletController_->onGround()){
/// Is the character currently jumping?
if(isJumping_)
{
/// Character is performing a Jump...
/// Check if the jump animation has reached the end (it's a non looping animation, clamping at the end frame)
if(!animCtrl->IsAtEnd(Animations_[Animations_Player::Jump].Name))
{
// Adjust Jump animation speed, so that on a level plane, the physics hull ought to land before animation finishes
animCtrl->SetSpeed(Animations_[Animations_Player::Jump].Name, 0.72f);
// TODO: Suppress Y translation in the hips (relative to root node)
animCtrl->PlayExclusive(Animations_[Animations_Player::Jump].Name, 0, false, 0.2f);
}
else
{
/// Jump animation has ended - but character is not touching the ground...
/// Start falling!
animCtrl->PlayExclusive(Animations_[Animations_Player::Fall].Name, 0, false, 0.2f);
}
}else{
/// Character is definitely falling - they've slipped off the edge !!!
animCtrl->PlayExclusive(Animations_[Animations_Player::Fall].Name, 0, true, 0.2f);
}Leith
Added animation for Running Forwards, and the key controlling it affects linear speed and animation speed in all cardinal directions. The implication is that running sideways (or backwards) means walking sideways (or backwards) more quickly
Added crouching, and crouch-jumping, and crouch-running, and crouch-run-jumping
You can mix the running, crouching, moving and jumping buttons as you wish - the result looks ok.
Leith
HOW TO BLEND BASE ANIMATIONS ON A SINGLE LAYER
Basically you just need to set the Weights for animations that are Playing.
Calling Play will set the target weight for that animation to 1, which is bad, so we fix it by calling SetWeight, and we’re gold.
else if(ctrlsDir==Vector3::RIGHT+Vector3::BACK)
{
/// Ensure our animations are playing, and set the animation speed
animCtrl->Play(Animations_[Animations_Player::WalkBackward].Name, 0, true, 0.4f);
animCtrl->SetSpeed(Animations_[Animations_Player::WalkBackward].Name,MOVE_SPEED);
animCtrl->Play(Animations_[Animations_Player::StrafeRight].Name, 0, true, 0.4f);
animCtrl->SetSpeed(Animations_[Animations_Player::StrafeRight].Name,MOVE_SPEED);
if(isCrouching){
/// Set weights for blending three animations
animCtrl->SetWeight(Animations_[Animations_Player::WalkBackward].Name, 0.2f);
animCtrl->SetWeight(Animations_[Animations_Player::StrafeRight].Name, 0.2f);
animCtrl->SetWeight(Animations_[Animations_Player::CrouchIdle].Name, 0.6f);
}else{
/// Set weights for blending two animations
animCtrl->SetWeight(Animations_[Animations_Player::WalkBackward].Name, 0.5f);
animCtrl->SetWeight(Animations_[Animations_Player::StrafeRight].Name, 0.5f);
}
}And here is a convoluted example of the level of control you get:
/// Character is Idle (and possibly crouching)
if (dir.LengthSquared() == 0.0f)
{
/// Stop all locomotion animations
if(animCtrl->IsPlaying(Animations_[Animations_Player::WalkForward].Name))
animCtrl->Stop(Animations_[Animations_Player::WalkForward].Name,0.4f);
if(animCtrl->IsPlaying(Animations_[Animations_Player::WalkBackward].Name))
animCtrl->Stop(Animations_[Animations_Player::WalkBackward].Name,0.4f);
if(animCtrl->IsPlaying(Animations_[Animations_Player::StrafeLeft].Name))
animCtrl->Stop(Animations_[Animations_Player::StrafeLeft].Name,0.4f);
if(animCtrl->IsPlaying(Animations_[Animations_Player::StrafeRight].Name))
animCtrl->Stop(Animations_[Animations_Player::StrafeRight].Name,0.4f);
/// Play an idle animation
if(isCrouching)
animCtrl->Play(Animations_[Animations_Player::CrouchIdle].Name, 0, true, 0.4f);
else
animCtrl->Play(Animations_[Animations_Player::Idle].Name, 0, true, 0.4f);
}Leith
I’ve added all four Running animations, and dealt with blending them for diagonal movement. Looks cool
I noticed something strange in my blending of diagonal walk animations today which is worth mentioning.
When blending the Forwards animation with Left or Right animation, the result looks fine.
But when we blend Backwards with Left or Right, suddenly the Hips look like they are oriented incorrectly for walking backwards!!
I solved the issue for backward diagonal movement by swapping the Left and Right animations, and setting their Speed negatively. This produced a much more correct result for blending backwards animation with sideways animation.
[EDIT}
The same thing was true for Running animations - for backward diagonal movement, I again switched the left animation for right, and negated the speed (to make it play that animation in reverse).
I found this to be very counter-intuitive, at first I could not figure out why this had worked!
else if(ctrlsDir==Vector3::RIGHT+Vector3::BACK)
{
if(isRunning){
/// Ensure our animations are playing, and set the animation speeds
animCtrl->Play(Animations_[Animations_Player::RunBackward].Name, 0, true, 0.4f);
/// Although we wish to move right, we really wish to face left.
/// We'll play the left animation, in reverse.
animCtrl->Play(Animations_[Animations_Player::RunLeft].Name, 0, true, 0.4f);
animCtrl->SetSpeed(Animations_[Animations_Player::RunLeft].Name, -1);
if(isCrouching){
/// Set weights for blending three animations
animCtrl->SetWeight(Animations_[Animations_Player::RunBackward].Name, 0.2f);
animCtrl->SetWeight(Animations_[Animations_Player::RunLeft].Name, 0.2f);
animCtrl->SetWeight(Animations_[Animations_Player::CrouchIdle].Name, 0.6f);
}else{
/// Set weights for blending two animations
animCtrl->SetWeight(Animations_[Animations_Player::RunBackward].Name, 0.5f);
animCtrl->SetWeight(Animations_[Animations_Player::RunLeft].Name, 0.5f);
}
}To move forwards, and to the left, we just mix forwards and left. Very simple.
But to move backwards, and to the right, we need to mix backwards, and “minus left” !!!..
Although we wish to move to the right, since we are also moving backwards, we need the hips in the general orientation for walking left, but we want the footfalls to occur in reverse.
The result is far more natural looking for backwards locomotions than just blindly mixing the animations for the cardinal directions.
I also added support for Weapon Attachments - the character can pick up (from the game environment) nearby weapons that the character can wield, the character can ready and unready any weapons they possess, but currently only one at a time can be wielded, and no support for two handed ik. So far, there’s only one weapon implemented - a teapot
Information for instantiating weapon attachments is declared in a custom xml file which contains a bunch of per-character tweakables.
<Comment> Weapons that this character can wield </Comment>
<Weapon Name="Models/TeaPot.mdl" Material="Materials/Stone.xml" AttachTo="RightHand" LocalPos="-25 0 0" LocalRot="-90 -90 0" Scale=".25 .25 .25" Uses="20" Damage="5" />
<Weapon Name="Models/Sword.mdl" Material="Models/Weapons/Sword/Materials/Sword.xml" AttachTo="RightHand" LocalPos="-25 0 0" LocalRot="-90 -90 0" Scale="1 1 1" Uses="20" Damage="12" />Leith
Just being able to Crouch is good. Crouch-Jump and Run-Crouch-Jump are also good.
But being able to Crouch is not free.
The Bullet kinematic controller does not provide it.
The Urho3D dynamic controller does not provide it.
Both are just demo code, designed to offer a starting point to a proper controller.
I am getting very close to a proper controller, but getting sidetracked by the need to attack my enemy!
I have an enemy, I now have a weapon, I need an attack animation, at least one
Leith
I’m experimenting with root motions.
I am inspired by rku’s proposed patch to Urho3D’s animation framework Root motion patch
The code is inspiring, but misguided - it gives us a way to obtain the root motions from each animationstate, but I wanted the final, blended root motion resulting from our usual animation blending.
Instead of poisoning the Urho3D codebase, I decided to try to apply the same code logic to my frame update - but instead of targetting individual AnimationStates, I chose to target their blended result at the root bone of the animations (which is currently always the Hips). I let AnimationController apply the root motion to the root bone, and then I step in and correct the root bone, transferring the motion channels I want to my preferred target node. I do so using frame delta transforms, because I don’t want to deal with moving things when the rootmotion animation ends, because I plan to blend more than one root motion and don’t expect them to be synchronized.
In the Update method, I sample the current localspace transform of the Hips.
In DrawableUpdateCompleted, I sample the new (animated) localspace transform of the Hips.
I choose LocalSpace because I am only interested in motion resulting from animation - not from physics or anything else.
I compute the (localspace) delta-transform as : DeltaXForm = OldXForm.Inverse() * NewXForm
We note the resulting transform is relative to the Hips.
Since AnimationController is updated very late in the frame, I don’t do anything with the resulting delta transform yet. Instead I wait until the next frame.
Back to the Update Method - just prior to recording the current localspace of Hips, I apply the delta-transform of the previous frame… I need to move the Hips localspace backwards by DeltaXForm, and I need to transform the character root node localspace forwards by DeltaXForm.

QBkGames
I’ve implemented a basic crouch by simply scaling the node on the Y-axis by half.
Not the best but works OK.
After looking at the Physx docs and samples, they do it the same way.
Leith
I did the same thing at first!
Then you want to add some interpolation, to smooth the transition from capsule height to height/2
Then you realize you can just measure the AABB of the animated model…
Leith
Today, I got Root Motion working to my satisfaction! Well, at least on level ground 
No more problems with “foot-slipping” during animations, so no fancy foot-solver!
Character animations may attempt to animate a target root bone (for me, it’s the Hips).
I wanted to transfer the animated XZ (LocalSpace) translation of the Hips to my character’s true (WorldSpace) root node, such that the character root node’s worldspace position reflects that of the rootmotion-animated hips …
This turned out to be both trickier than it sounds, as well as turning out to be almost that simple.
My solution does not involve editing Urho3D engine sourcecode, I was able to solve the problem within Urho’s frame update scheme.
Initially, I tried to use basis-inversion of animated Local transforms to compute inter-frame deltas, but (possibly due to my use of Scale on my model) I found the results were horribly inaccurate, so I abandoned that pathway.
Next I tried computing my deltas in WorldSpace, and quickly noticed another rapidly-compounding error term. It turned out that my method for measuring worldspace deltas was flawed, because my frame of reference was moving! I needed a moving point of reference
I realized that the compounding error term could be cancelled easily, by summing the translation delta vectors from previous frames during root motion, and subtracting that sum from the “apparent” worldspace position of the hips when measuring the next delta.
The result was perfect - except for the final frame of root motion animation, which was handled by zeroing the localspace XZ translation on the hips due to unwanted animation in the final frame, and returning early from the root motion handler (so not applying root motion in the final frame).
I’ll probably upload a short video to show the results.
The code is still quite horrible… it needs a refactor to make it more generically useful, but the technique works regardless of armature scaling, and should work for multiple blended root motion animations, since the delta-sum is a measure of the combined effect of all animations on the hips (or other preferred target bone) as measured over time.
At the very least, it will work for blending rootmotion animations whose play length has been synchronized (either through changing the animation speeds or total keyframe lengths), and blending rootmotion animations with in-place animations should “just work” without any synching needed.
Next, I need to think about how best to combine root motion translation with physics - we want the character’s root motion to be applied to the physics hull, but we also want collisions on the physics hull to determine the final position of the character. The problem is that animation, and root motion handling, happens after physics has updated, so there’s a bit of a chicken and egg problem to work out.
Leith
Without discussing the “root motion sum” issue, I’m generally applying root motion within the Urho3D frame update scheme as follows:
I still need to experiment with blending rootmotions (especially non-synchronized ones) but I feel confident that I can track the weighted contributions of individual rootmotion animations if I find that to be desirable.
Hey, at least physics is working in harmony with root motion! I’m pretty happy with that.
Leith
Now uploading a short video that shows some root motion in action, along with rotating the character mid-way through such a motion. The final attack animation in this video has no root-motion handling applied, so we can see the character step slightly outside the physics hull.
Please excuse my physics debugdrawing, and yes this character still interacts correctly with complex environments, I simply didn’t show that here.
https://www.dropbox.com/s/1r3z9xdi0293ecv/WIP_Latest.mp4?dl=0
Leith
A brief discussion of measuring (worldspace) animation delta transforms in a moving frame of reference.
Basically, the animated local transforms that Urho’s animation system writes to our armature nodes are “absolute local” values. For example, in a walk cycle with root motion, we might see that Hips Local Position Z is moving from 0 to 150 (extreme example, for clarity).
Since the Hips node is a grandchild of the character’s root node, any changes made to character root transform will also affect the worldspace position of the hips - but the hips are not aware of this… if we want to constrain our character root node to follow the hips, then we need to realize that each time we apply a correction to the root node transform, it will have a compounding effect on the “apparent” world position of the hips (and therefore the entire rendered model).
The animation keyframes for the Hips are not aware that you are moving the root node, and without further correction, the result looks like the model is rapidly accelerating away from the root node.
There are probably a lot of different ways to handle this situation - I tried several before settling on using a simple yet robust vector sum of translation deltas as a compensation value to counteract the compound error term.
Leith
The logic I use for driving and switching character animations is currently completely hardcoded. Although efficiently structured, it is a big mess of conditional logic. I note that the number of branches in the conditional logic is some orders greater than the reduced set of character behaviour states that it encodes.
enum CharacterState_Player{
Idle,
Walking,
Running,
Attacking,
Something
};I am strongly tempted to replace it with a state machine which can be data-driven, and whose state transitions are guarded by soft-programmable conditional logic. What I’m describing would represent something like Unity’s Animator component, although I would be proposing to embed the FSM within my Character class, such that it effectively drives the state of Urho’s AnimationController.
It’s not a trivial undertaking given that the Character class still needs lots of polish, and the added complexity is something I don’t actually need right at this very moment, but I believe my existing code would run a lot more efficiently using a state machine pattern than it does now.
I’m now toying with some draft sourcecode, without compiling it or trying to design what I want in my head, just to get a “feel” for what I am trying to achieve and how I intend to get there. I may never use the code - I may never create a design document for this feature - but I will experiment “on a napkin” to see how I feel about how well this mechanism fits in with the concept of my game, and what kinds of pros and cons are associated with it.
Leith
Today I spent some time working on the main menu UI.
I really dislike doing gui stuff, but it’s necessary, so I do it.
Implementing the UI stuff today has given me a huge sense of relief about my early adoption of a game state machine implementation.
/// MAIN MENU STATE: User has clicked on a UI Element (such as a button)
void GameMainMenuState::OnUIElementClicked(StringHash eventType, VariantMap& eventData){
UIElement* clicked = static_cast<UIElement*>(eventData[UIMouseClick::P_ELEMENT].GetPtr());
if (clicked == PlayButton_)
{
/// Switch to LOADING state, and begin performing a scene change
changeGameState(GAME_STATE_LOADING);
((GameState::GameLoadingState*)GameStateManager::getState(GAME_STATE_LOADING))->changeScene("gamescene.xml");
}else if(clicked == QuitButton_)
/// Send request for application to quit
SendEvent(E_EXITREQUESTED);
}I was reminded yet again about the trap of 2D pixel coordinates versus application window dimensions - the resizing issue. In my own engines, I usually use NDC coordinates to specify 2D window coordinates, and always offer a method to convert between pixel coordinates and NDC coords - I’m not up to date on how to deal with window resizing, could anyone elighten me?
Leith
My skills as a graphic layout artist are negligable, however I do functionality very well.

But to be fair: the Stanford Teapot Combo Attack is hilarious, and I may keep it in the game.
Leith
A thought experiment
I am aware that this is logically incomplete - it is a “thought experiment”, and nothing more at this stage.
Leith
Today I experimented with “Dark Lighting” (aka Subtractive Lighting).
I wanted to add “local gloom” to my game scene.
I achieved this by using a negative value for Brightness on a Point Light (no shadows), in the presence of a general Directional Light (with shadows) plus a bit of ambient light.
This turned out pretty well, although I did notice one strange side-effect resulting from the way Urho’s lighting equation is implemented,
If we give our darklight a colour, the result will appear to be the inverse of that colour.
For example, a “red” darklight gives surfaces a “blue/green” appearance.
Just thought it was interesting
[EDIT]
There’s also a subtle artefact created in the Shadows - dark lighting, with shadows disabled, darkens shadows from light that have shadows enabled,… but only where the dark light has effect! IE, a dark light does not darken a volume, it literally casts negative light, which falls on surfaces similarly to regular light! This was not exactly what I was after, lol 
I also added some quick code to test for character player hitting enemy with a weapon - this was just an instantaneous sphere test on the model’s right hand. It works, but it’s hardly good enough.
I guess I’ll add a proper physics hull to the weapon instead, and use collision detection instead of collision polling, I was just in a hurry to get a result. I want to move on to collision responses as quickly as possible, I intend to use additive blending to add “twitches” to show hit responses. We’ll see how that works out before looking at alternatives.
Incase anyone cares, the white cylinder is the “physics outer hull”, the blue one indicates where the Hips (aka Pelvis) bone is positioned/oriented, and the purple one indicates where I think the character’s "true root node’ is positioned/oriented. Just visual tools I use during development to help confirm things are where I think they are, and oriented the way I think they should be, with respect to physics versus animation.

Pencheff
Put the buttons inside Window or UIElement and set that window’s alignment HA_CENTER and VA_CENTER. Then align the buttons in a vertical layout and set their max size to the desired button size.
Leith
Thanks for the tip! The main menu is not using a UI Window - can I assume that element deals with resizing of the application window / changing to different fullscreen resolution?
Leith
Today I added physics to the weapon that is currently being wielded by the player character, and set up collision filtering such that I could detect collision between the player’s weapon, and the bodyparts of the zombie’s animated armature.
Success! I can detect the collision, and soon I will be able to respond to it appropriately.
I know in advance which weapon, or which zombie, was involved, due to how I set up the collision event subscription. But there’s currently no way to determine much more than that.
I’m in coder hell, because I don’t know how to set user pointers on Urho3D objects.
The information I get about the collision of the two bodies is not really enough to figure out exactly which two characters are duelling. And there is no clean way to perform an “upwards search” for a given component or node in a higher level of the scene hierarchy.
Leith
Looks like I found a way to tag Nodes with object references… the Node class has a method called SetVar that we can use to add Named Variables (variants) to any Node. In turn, variants can hold both raw pointers (void*) as well as reference-counted pointers to Urho objects.
I’ve run out of time to test it out tonight, but I feel confident that I can tag the parent nodes of my rigidbodies with a reference to their owner character controller component object.
This leaves me with one more small problem - currently, the player character and the enemy character are using different controller classes… until that is resolved, I’ll need a way to determine the type of an object held by a weakptr.
All ref-counted objects derive from Urho’s Object class, which provides some very basic type identification support methods, including GetTypeName, should be enough to get me out of trouble.
[EDIT]
SetVar works perfectly, at least in my test case.
I’m effectively able to tag scene nodes with pointers to pretty much anything I want, and give a name to the tag. This means now I can tell which character’s axe just hit which zombie in which bodypart , where on the body exactly, and so on… when a collision occurs between child rigidbodies, I can now tell who the parent characters are (if any) and what type (if that matters).
I’ve now tagged all active weapons, and all zombie bodyparts, with pointers to their owner characters…
Here’s what (some of) the code looks like in my node collision handler:
/// Query the Weapon and the BodyPart to find out "who owns them"
/// Since zombies can't hold weapons, this logic is simplified:
KinematicCharacterController* pthis = (KinematicCharacterController*)nodeA->GetVar("OwnerCharacterPtr").GetPtr();
DynamicCharacter* pthat = (DynamicCharacter*)nodeB->GetVar("OwnerCharacterPtr").GetPtr();Leith
Now that I can detect collision between Weapon and Zombie Armature, and tell which characters are involved, I can think about how I’m going to handle the response.
Currently, the physics collision for the weapon vs zombie is handled by the player character (who is holding the weapon)… but the response needs to be applied to the “other guy” - both characters need to be notified about the collision - but both don’t really need to subscribe to receive it.
The zombie has over a dozen bodyparts in its armature, and in theory I can provide a different sort of hit response for every combination of weapon and bodypart. I keep thinking in terms of a matrix of handler functions, rather than a slab of conditional logic, but I’ll probably start with switched case logic for handling zombie hit responses.
[EDIT]
For now, hitting the zombie anywhere at all, even with a teapot, results in the zombie dying (with animation).
When the animation ends, the zombie is resurrected almost instantly (blend to state), without any proper “standing up” animation happening (I just wanted to see the zombie die, but it also gets up again)
Leith
if(isDying_){
// Play exclusive non-looping animation
animCtrl->PlayExclusive(Animations_[Animations_Zombie::Z_Dying].Name, 0, false, 0.2f);
// Check for end of non-looping animation
if(animCtrl->IsAtEnd(Animations_[Animations_Zombie::Z_Dying].Name))
isDying_=false;
// Early-Out
return;
}Dave82
As i mentioned in the another thread it is better to send your own events and use a script to handle them.
A script is way more faster to work with and you can do unlimited things with it.
In my previous version of my game i did hardcode everything too (well almost) and found out it is a very very very bad idea. It totally tie you hands. No to mention that for every little change you have to compile and link your game which is absolute waste of time when you just changed a float variable.
Also handling game logic in a component which is not related to game mechanism (e.g collision in Character controller component or picking up items in character controller etc) is not a good idea either.
I did this too and run into same problems you just started unfolding. At first it looks clean a nice but in the long run , once you start adding exceptions to your game logic (eg. some enemies have different weapons , some enemies can have different weapons if the player enters in a room through a different door , enemies die differently if the player has certain items in the inventory etc) will turn into a mess.
Jjust my two cents !
Leith
Hi Dave, I’m not sure I agree with you about speed, but scripting would be nice. There are two problems with this idea - firstly, the script interface was never intended to return values, and I want it to make decisions. Secondly, script execution has overhead, and the more times we cross the boundary between script and native code, the more overhead we wear. This is even before we did anything useful.
The main benefit I see coming from script, is hot loading, and reducing iteration times.
Ideally, I would have runtime compiled C++, but it’s not a perfect world yet.
In the case of a two object collision, I can call a public method on the other guy, I don’t need to register both classes to detect the same event when the class objects interact, thats what I was getting at
If you have a decent pattern for implementing scripting in a largely c++ game environment, happy to take a look
Leith
Being able to temporarily kill the zombie with a stanford kettle feels good - I have a lot of work to do, but I feel like I’m on track. The basic game mechanics look and feel ok, including and especially the player character controller… There are lots of problems to talk about, but it works.
Dave82
I’m totally happy with AS. Semantically it is 99.9% identical to c++. As for speed i usually handle only events in scripts. Rarely use per frame calls so speed is not an issue at all in my case
events example in scripts :
HandleZoneEnter(StringHash event , VariantMap eventData)
{
// This function is called once a player enters in one of trigger areas. Once the player is inside the zone
// The function IS NOT called until player leaves the zone.
// The event data contains the CharacterController , the CharanterController’s node
// the area’s RigidBody and node
}
HandleProjectiletHit(StringHash event , VariantMap eventData)
{
// Called if a projectile in the scene hits an obstacle or an enemy
// - CharacterController who shot the projectile
// - hitType (static geometry , enemy , another character etc)
// - if an enemy was hit , the event data contains the AIcontroller of the enemy
// etc
}
As you see these events are called occasionally so it is really not much impact on the speed.
I use updates per frame only when the game is in Puzzle mode (player must solve a puzzle) when speed is not really a factor.
It all depends on the game you working on. If you plan to have some complex maps with 30-40 enemies then yeah… AS scripts for enemy logic is most likely not a good choice. However in sample 21 i don’t see any lagging…
For the script functions returning variables , i agree it is an issue but i use some workaround with SetVar GetVar so i can store the results temporarily. Whenever i can , i go with design choices to not have the necessity for returning values 
Leith
I’m not a fanboy of any particular language, but I do worship at the altar of runtime performance.
I think AS is one of the better choices in terms of call overhead across the language barrier. You clearly understand the cost associated with frequently crossing that wall! And yes I like its semantics a lot more than some of the usual suspects (Lua, I’m looking at you).
I’m working on realtime combat with animated 3D bipeds (ambitious, but I’m not new to gamedev), and need to update my logic fairly frequently. I use the physics update to drive much of my AI logic, because the update rate is capped at 30fps, and the timestep is fixed. At that rate, I could probably afford to handle AI update logic in AS, but right now, I don’t see any compelling reason to do so.
Outside of the character state machine, I have few events that are complex enough, and happen rarely enough to warrant handling in script, versus the time it would take me just to write the script bindings.
Leith
Added a second “zombie death” animation, and randomly choose which to play when a zombie is “killed”.
One shows the zombie falling backwards, and landing heavily on his back, while the other shows the zombie falling forwards, and landing heavily on his face. Both look pretty cool - they are both root motion animations - unfortunately, the zombie is using my older character controller, which has no support for root motion animations, so the outer physics hull just sits there while the zombie appears to hit the deck - the zombie is leaving its physics hull during replay of root motion animations, and for now, that’s just fine - we accept that the zombie will appear to go through solid surfaces during death animations until I get off my ass and update my sourcecode to use the new controller for zombie characters.
Forking the old character controller (dynamic) to create a new experimental one (kinematic) was not a mistake - I could not have known that the new controller would be so successful, so forking was a risk management strategy to guarantee I did not poison my own codebase.
Now I need to “do a merge” and bring them both together, taking the “best of both worlds” to create a hybrid. If that goes wrong, I have a second level risk mitigation strategy in place: version control
Leith
I’ll soon post a video showing the zombie being “killed”, and then standing back up, to be killed again.
But before I do so, I would like to know which weapon you would prefer I use - the stone axe, or the stanford teapot? I’ve given the player character a stone axe for testing, but there is also a teapot nearby…
Cast your votes!

Miegamicis
Teapot for sure.(20 chars)
Modanung
Stanford axe! 
Leith
This post is not aimed at anyone in particular - it’s aimed at anyone who reads it.
https://www.dropbox.com/s/ey1jp0hcmm1q3mh/WIP_ZombieDeath.mp4?dl=0
I got a bit lost while recording this, but it does show the things I wanted to show (eventually).
Now that gameplay is becoming more mature, its time to begin considering what kind of VFX are appropriate. The first one that comes to my mind, is blood splatter decalemetry. This would involve two particle systems: one to represent the “fountain” or source of the blood splatter, and one to represent the decals of particles that have hit a surface in the game world.
One slight problem here, is that I would like to paint decals on animated meshes as well as static ones, and I have not put much thought into how to pull that off…
What kind of video effects do you think might work in this genre, and what recommendations / suggestions do you have for production quality implementation? Obviously I have some ideas in mind, but I am very open to any and all suggestions, given that I have not made any firm decisions or begun on any concrete implementations in this regard.
Leith
Here is an old image from another project that shows what blood splatter decalemetry means.
Urho has something called DecalSet, and it looks like it can deal with skinning, but there’s no examples, and precious little documentation on how to implement it. Looking into it.
OK so we have one example - Sample #8 - but it’s a fairly weak example, only showing some of what is possible.
Modanung
I’m in favour of expanding the example to demonstrate animated decals.
Leith
Example of decal skinning:

It turned out to be super easy to get decal skinning working - though I did need to increase the default max vertex and index count of the decalsets when applying them to character models (some thousands of triangles were being taken in for each decal - I suspect this is a bug related to my scaling of the armature / bonescale not being taken into account in DecalSet).
I also needed to set the material’s culling mode to CCW in order to hide backbaces (they were causing a small amount of pixel bleedthrough on the opposite side of a character)
Oh yeah, I’m using DiffMultiply technique, which leads to overlapping decals becoming darker rather than brighter. I think it looks better than the default Diff technique.
Skinned decals look quite good, and better than I had expected with no pain whatsoever.
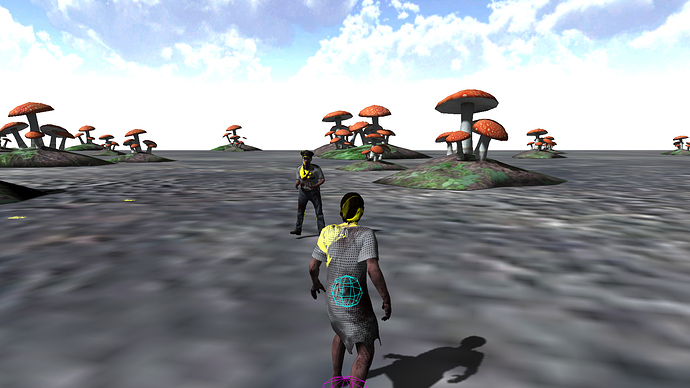
Modanung
Not to degrade your efforts… but now it looks like piss stains. 
Maybe a chartreuse tint would work better, something like 0.8 1 0 1 in float RGBA:
![]()
Would also fit better into Urho’s branding, I think. (Mentioned this because I thought you might be about to issue a PR to modify the sample.
Leith
LOL!
Thats literally the yellow fish settings, with Diff technique, at Unit scale (radius 0.5), as seen in sample 8 - yes it looked horrible - so I made some better art.
I hereby grant royalty free the right to use this image in any commercial or personal project, to distribute it without attribution, and to alter it as you see fit.
Modanung
I personally believe we should refrain from adding adult content (blood and gore included) to the samples.
Leith
I’ll set up a colour scheme in chartreuse if you insist - I know that red blood is an issue in some countries, and particularly those with strong rating systems - but it will just be a colour scheme I can swap out
Leith
You have the Adam character to splat in the Samples - someone just needs to put “Jack” into the decal sample and adjust the decal size, colour and increase the default max verts and indices on new decalsets - and voila, new demo 8.1
In sample 8, theres a line of code that checks if the target drawable has a decalset yet, and if not, adds one … after doing so, we can increase the verts/indices if we see warnings in the console output about decal add failed
// Check if the target node has a DecalSet - if not, add one now
auto* decal = node->GetComponent<DecalSet>();
if (!decal)
{
auto* cache = GetSubsystem<ResourceCache>();
decal = node->CreateComponent<DecalSet>();
auto* animated=node->GetComponent<AnimatedModel>(true);
if(animated!=0){
decal->SetMaxVertices(4096); // Increase resolution of decal geometry to suit animated meshes
decal->SetMaxIndices(16384);
}
Material* mat = cache->GetResource<Material>("Materials/BloodSplatDecal.xml");
mat->SetCullMode(CULL_CCW); // Hide backfaces of decals to prevent pixel bleeding issues
decal->SetMaterial(mat);
}But essentially, we need no other changes - we just need an animated target, and the remaining code from sample 8 will just work
Leith
This one’s a no-brainer : and skinned decals is something that you don’t get for free in a lot of game engines.
You could always apply smiley face stickers in the sample, but you can’t set the material per decal, only per decalset.
Leith
One of my common includes across projects and engines:
#define AliceBlue 0xF0F8FF
#define AntiqueWhite 0xFAEBD7
#define Aqua 0x00FFFF
#define Aquamarine 0x7FFFD4
#define Azure 0xF0FFFF
#define Beige 0xF5F5DC
#define Bisque 0xFFE4C4
#define Black 0x000000
#define BlanchedAlmond 0xFFEBCD
#define Blue 0x0000FF
#define BlueViolet 0x8A2BE2
#define Brown 0xA52A2A
#define BurlyWood 0xDEB887
#define CadetBlue 0x5F9EA0
#define Chartreuse 0x7FFF00
#define Chocolate 0xD2691E
#define Coral 0xFF7F50
#define CornflowerBlue 0x6495ED
#define Cornsilk 0xFFF8DC
#define Crimson 0xDC143C
#define Cyan 0x00FFFF
#define DarkBlue 0x00008B
#define DarkCyan 0x008B8B
#define DarkGoldenRod 0xB8860B
#define DarkGray 0xA9A9A9
#define DarkGreen 0x006400
#define DarkKhaki 0xBDB76B
#define DarkMagenta 0x8B008B
#define DarkOliveGreen 0x556B2F
#define DarkOrange 0xFF8C00
#define DarkOrchid 0x9932CC
#define DarkRed 0x8B0000
#define DarkSalmon 0xE9967A
#define DarkSeaGreen 0x8FBC8F
#define DarkSlateBlue 0x483D8B
#define DarkSlateGray 0x2F4F4F
#define DarkTurquoise 0x00CED1
#define DarkViolet 0x9400D3
#define DeepPink 0xFF1493
#define DeepSkyBlue 0x00BFFF
#define DimGray 0x696969
#define DodgerBlue 0x1E90FF
#define FireBrick 0xB22222
#define FloralWhite 0xFFFAF0
#define ForestGreen 0x228B22
#define Fuchsia 0xFF00FF
#define Gainsboro 0xDCDCDC
#define GhostWhite 0xF8F8FF
#define Gold 0xFFD700
#define GoldenRod 0xDAA520
#define Gray 0x808080
#define Green 0x008000
#define GreenYellow 0xADFF2F
#define HoneyDew 0xF0FFF0
#define HotPink 0xFF69B4
#define IndianRed 0xCD5C5C
#define Indigo 0x4B0082
#define Ivory 0xFFFFF0
#define Khaki 0xF0E68C
#define Lavender 0xE6E6FA
#define LavenderBlush 0xFFF0F5
#define LawnGreen 0x7CFC00
#define LemonChiffon 0xFFFACD
#define LightBlue 0xADD8E6
#define LightCoral 0xF08080
#define LightCyan 0xE0FFFF
#define LightGoldenRodYellow 0xFAFAD2
#define LightGreen 0x90EE90
#define LightGrey 0xD3D3D3
#define LightPink 0xFFB6C1
#define LightSalmon 0xFFA07A
#define LightSeaGreen 0x20B2AA
#define LightSkyBlue 0x87CEFA
#define LightSlateGray 0x778899
#define LightSteelBlue 0xB0C4DE
#define LightYellow 0xFFFFE0
#define Lime 0x00FF00
#define LimeGreen 0x32CD32
#define Linen 0xFAF0E6
#define Magenta 0xFF00FF
#define Maroon 0x800000
#define MediumAquaMarine 0x66CDAA
#define MediumBlue 0x0000CD
#define MediumOrchid 0xBA55D3
#define MediumPurple 0x9370D8
#define MediumSeaGreen 0x3CB371
#define MediumSlateBlue 0x7B68EE
#define MediumSpringGreen 0x00FA9A
#define MediumTurquoise 0x48D1CC
#define MediumVioletRed 0xC71585
#define MidnightBlue 0x191970
#define MintCream 0xF5FFFA
#define MistyRose 0xFFE4E1
#define Moccasin 0xFFE4B5
#define NavajoWhite 0xFFDEAD
#define Navy 0x000080
#define OldLace 0xFDF5E6
#define Olive 0x808000
#define OliveDrab 0x6B8E23
#define Orange 0xFFA500
#define OrangeRed 0xFF4500
#define Orchid 0xDA70D6
#define PaleGoldenRod 0xEEE8AA
#define PaleGreen 0x98FB98
#define PaleTurquoise 0xAFEEEE
#define PaleVioletRed 0xD87093
#define PapayaWhip 0xFFEFD5
#define PeachPuff 0xFFDAB9
#define Peru 0xCD853F
#define Pink 0xFFC0CB
#define Plum 0xDDA0DD
#define PowderBlue 0xB0E0E6
#define Purple 0x800080
#define Red 0xFF0000
#define RosyBrown 0xBC8F8F
#define RoyalBlue 0x4169E1
#define SaddleBrown 0x8B4513
#define Salmon 0xFA8072
#define SandyBrown 0xF4A460
#define SeaGreen 0x2E8B57
#define SeaShell 0xFFF5EE
#define Sienna 0xA0522D
#define Silver 0xC0C0C0
#define SkyBlue 0x87CEEB
#define SlateBlue 0x6A5ACD
#define SlateGray 0x708090
#define Snow 0xFFFAFA
#define SpringGreen 0x00FF7F
#define SteelBlue 0x4682B4
#define Tan 0xD2B48C
#define Teal 0x008080
#define Thistle 0xD8BFD8
#define Tomato 0xFF6347
#define Turquoise 0x40E0D0
#define Violet 0xEE82EE
#define Wheat 0xF5DEB3
#define White 0xFFFFFF
#define WhiteSmoke 0xF5F5F5
#define Yellow 0xFFFF00
#define YellowGreen 0x9ACD32
Leith
In my old Unity demo of splat decalemetry (scroll UUUUP) the splats do not get darker, or lighter, when they overlap. What should I be doing to achieve the same in Urho? How do I do a “replace” blend operation?
Modanung
On the chartreuse spectrum from web chartreuse to traditional chatreuse (#DFFF00) in between the grey dots is where my eye-brain-complex can agree on the colour actually being called chartreuse. With the oval marking the colour of its namesake, as I would point it out.
![]()
Leith
Yes I tend to agree - perhaps it was a typo - its not a colour I use ever
I’m deferring to your DF and adjusting that header
What colours are at the two markers?
I want 30 percent from the left marker , must be around B0 at a guess
b0ff00?
“sickly lime green”
Modanung
With 30% off the first marker it’s #90FF00.
Picked with gcolor2, btw. Quite handy when your dealing with colours outside image editors. I have it under a shortcut (Super + KeypadSlash).
The dots are at 95 and d6 for the red.
Leith
ah ok , 95ff00 looks good to me quite a way off where it was at 7F
funny how long small things can linger in your old code, that you never notice
Modanung
Ah, but #7FFF00 is the official definition of chartreuse green or web chartreuse. As traditional chartreuse is also called chartreuse yellow it should not be confused with the colour of yellow chartreuse. (that’s yellow)
Leith
We did note that yellow looks like urine - gah, my header, I’ll add a note next the the colour and state that I don’t like the standard chartreuse(s - plural)
Leith
I’ve started using the old version of the editor a bit more. Added a particle emitter to the scene to test stuff out.
I have to use the older 1.7 version until/unless I hear about an update being pushed to the git master.
I notice that the editor sort of supports the notion of custom components with public attributes.
But I don’t see a way of actually adding custom components to a scene in the editor.
Is there a way?
Leith
I’ve added a test “fire” to my game scene - next I will play with attaching fire to the animated zombie!
Besides adding a fire to the test game scene (aka sandbox), the fire emitter was exported “by node” from the editor to an xml file, so instancing in code should be trivial.
Weapons are just node-attachments glued to the bone-nodes of the character model.
In theory, fire can be handled in exactly the same way.
RIP, Niki Lauda
Leith
Today I’m deriving a new component from Urho’s ParticleEmitter class.
I require collision detection for a relatively small number of 3D particles for a special effect.
Basically I want to detect when my particles hit surfaces in the game world (static or otherwise).
Urho’s particle system does not provide support for collision detection, but otherwise does pretty much everything I want.
The plan is to override the Update method with one that adds collision testing to the particle enumeration. Particle collisions will generate a new Event that can be handled elsewhere, while the particle itself is automatically removed from the emitter (I don’t intend to support reflection or sliding as it does not fit my use-case and so is “out of scope”).
Note that I don’t intend to create physics objects at all - not a single one… theoretical shapes and “swept” collision tests are just fine with me. I’m a massive fan of the “swept sphere test”, which uses a quadratic equation to “extrude a sphere over time” to form a capsule of sorts, and return a time-based value for when (and so where) the moving sphere first intersected some other surface.
Leith
Deriving a new class from ParticleEmitter turned out to be a bust so far - serialization is broken, I thought I could just inherit that, but no dice.
Also, the derived class is completely alien to the Editor, so it’s unlikely that the editor will recognize any proxy. Ugh. The editor does not try hard enough to check if an unknown component derives from a known type, so inherited attributes are not exposed in the editor.
Leith
Today it occurred to me that a chicken’s skeleton is not that different from a human. It’s a biped, it has a pelvis, legs, arms of sorts, a neck and a head. I should be able to get a zombie chicken working.
The more I thought about it, the more I realized that this can be applied to quadrupeds as well - a horse has “arms and legs” and a generally similar structured skeleton, if we dismiss the notion that a horse has four legs…
Leith
I’ve updated the name of this topic to reflect the name I have chosen for the game.
Leith
Today, I added my first experimental script based component, and it “just works”.
Unfortunately, I also tried some other things I expected to “just work”, like rolling friction, and they totally failed (in the 1.7 editor)
Leith
Today, I added a flashlight.
My player character’s bone orientations are horrible, so finding the proper local transform for attachments has been trial and error. The values for attachment transforms found in the Editor don’t work in my game at runtime, probably due to scale on bone animations. I really need to add some in-game UI controls so I can find the right values for new attachments at runtime.
Also, I now have a reason to think about the player’s hand animation more carefully - I think hand IK would be overkill, but additive blending of a “fist pose animation” (a single keyframe) may suffice to close the left hand around the flashlight in a more pleasing way that still works with full-body animations.
Leith
All of me
Why not take all of me
Can’t you see
I’m no good without you
Take my lips
I want to lose them
Take my arms
I’ll never use them
Your goodbye left me with eyes that cry
How can I go on dear without you
You took the part that once was my heart
So why not take all of me?
Miegamicis
That’s beautiful, man!
Modanung
Reminds me of Skyclad, Bury Me:
The only thing you never did
Was to have the decency
To kiss this corpse and nail the lid
Come on, come on and bury me!
Leith
The forest trail opens into a clearing that contains a stately home which has clearly fallen into a state of disrepair - yet there are signs of habitation, including a well-kept garden. The building has two levels, and from somewhere in the upper level, we can faintly hear music playing. It sounds like a gramophone, the sound quality is not good, and the music is melancholy, it sings of age, sadness and regret.
Leith
What silver army is wet yet will not dry, is solid when cold, is liquid when warm, and is gaseous when hot?
It’s sourced from the blood of dragons, which are not real, yet it is real, it is noble, it can dissolve gold, and be easily separated from gold.
It is not the sap of a tree, it was sourced from a mine, it is therefore a mineral, taken from a cave, scoured from a dark place in the earth.
It is a poison to man, and one of its names is vitriol, though this name was applied to many things.
In the alchemists retort, it represents the snake, which is the reason we bound the seal many times in thread to ensure the snake did not escape to bite us with its venom.
What then, is this mystery material, which was described by Hermes Tristmegistos?
What is the Prima Materia of the early Metal Alchemists?
Leith
Added a couple more Zombie instances - suddenly looking more like a decent game Being chased by multiple zombies is hilarious (to me).
Also added a small staircase - it was too complex for triangle mesh physics, so I added a couple of physics shapes to fake it.
Using the (old) scene editor more, but not entirely relying on it yet.
Leith
Abercrombie was so meek and quiet;
Abercrombie was the tearoom type.
Oh, you’d never think he’d start a riot;
then Abercrombie had a zombie.
Abercrombie never stole a hansom (1).
Abercrombie never did a bump.(5)
Never thought of crawling through a transom; (6)
then Abercrombie had a zombie.
He never passed a stop. He never sassed a cop.
He never drove a car into the Astor bar (2).
He didn’t try to wade in the Aquacade (3);
He was just an icky (4), I’m afraid.
1 - reference to hansom cab company, a taxi
2 - Astor bar, somewhere that does not let you enter, even in a taxi
3 - A water based embargo on goods and trade
4 - Somebody nobody wants to take home to meet their mother
5 - Eliminating the enemy in the most physical and obvious way
6 - A water tunnel that crosses underneath a fence line, allowing access to an otherwise secured area
Leith
Today I added my first deserted building.
It’s not a building that you can enter - but you can climb on it and interact with it.
There’s a ladder on one side, and a few rusty old oil barrels scattered around.
I wonder what’s on the roof?

Leith
There’s no “climb ladder” animation, but the ladder is well defined in terms of physics, and we can jump up, also from the barrels - we can jump too damn high! 1.8 meters in fact.
Leith
Leith
I’ve been held back a little by some missing functionality in Urho3D’s physics system.
In some ways, Urho reminds me of some of my own engines - no matter how long you spend developing wrapper-like things, the wrapper will never be complete.
Today I wrote a solution for detecting collision events between rigidbodies and ghostobjects, including event sourcing.
I have posted the solution in another thread for further comment and review.
Leith
Zombie attacks now deal damage to the player, and player death is detected (but not yet handled).
Player attacks currently knock down a zombie for ten seconds - no permanent damage is done to the undead - likely I’ll get started on healthbar indicators over the weekend.
Now that the player character can “die”, I notice that I have not yet provided any sort of death sequence! There are no animations for player death, and there is no ragdoll support on the player character controller.
I have to make a decision.
Canned death sequences, ragdoll death, or inplace cutscene baked animations

Leith
I’m still only using experimental attack animations.
Definitely need to spend more time developing melee combat sequences, though I really need to start working with a professional 3D animator.
Leith
On the other side of town, in the car park of the local Blockbusters, life and death was hanging in the scales - they seemed to come from everywhere, and with no ammo the guns were useless. One of the pair chose a well-scalloped samurai sword, which could have been authentic if judged outside this circus environment. His brother took up a frozen fish - not the best possible choice of weapon, but with no time to think, he chose not to think. This weapon would be adequate.
Leith
I’ve got my hands on three new Human models which will act as NPC’s in the game.
One of them, a child, will lead you deeper down the rabbit hole.
Without the generous donations of royalty-free assets by various graphic artists around the world, I would never have taken on such an ambitious project. I hope to return their kindness by bringing their work to life in ways they probably never imagined.
In that spirit, I hope to hand anything (code related) I created, and find particularly useful, back to the Urho community!
I’m pretty much already at the stage where I need to start working on my own shader variants.
This could get interesting, it’s been a while but I used to be pretty decent at shader coding.
Leith
I don’t know about you guys, but for me personally, I realized a long time ago that scripting held few advantages for me. I found that my scripts invariable ended up calling my binary code on the other side of the language barrier, and that mainly, I could entirely replace scripting with a data-driven approach: essentially, separate the code from the data, and load the data as required into the code objects at runtime. I seem to get more bang for buck from this approach, as I tend not to hit the compile button every two seconds.
Dave82
I can’t imagine more time wasting approach than “static coding”. I did this in the beginning but thankfully i have replaced it with 100% scripting so right now i can’t even remember when did i pressed the compile button last time.
I think you worry too much about the AS performance. Whatever game you’re working on , scripting ( most likely) won’t be the bottleneck of the game but dynamic lights or shadows and other GPU related stuff.
Leith
Let me be more clear: I tend to spend a lot more of my time tweaking data values stored outside of my code in external files. Could be binary, could be xml/json, could be angelscript. When I save changes to the data outside of my running application, I can hotload the data in my application in exactly the same way as I can in script. The data I load typically includes changes to state flags and similar variables that typically control the behavioral logic of the code (much more than the other way around).
In the sense that my code logic tends to be directed by data that can be hotloaded, there’s not many times in my day where I need to go making changes to the codebase, and with that in mind, I’ve found no compelling reason to use scripting - at least not in this project, and not at this stage.
This is likely to change soon, as I’m starting to bring in some human NPC’s which will require a more sophisticated approach than I have implemented here so far. That is likely to affect my iteration times a lot, and I’ll probably accept at some point that I can start to use script, but my main use case for doing so is logic, and our script implementation is not well set up to return values - there is a hack, but it is just that.
Leith
Writing code to load behavior trees from the JSON that is published by “owl-bt”, into the behaviourtree codebase provided by lezak (thanks so much man, its a great start!)
I’ve had to make a few minor additions to lezak’s code, but nothing substantial was changed (yet).
Some minor roadblocks involve type conversion between JSONValue and Variant types.
Leith
The main changes I have made to lezak’s codebase are as follows:
1 - Every concrete node class has a static RegisterObject method, which registers a class object factory with Urho - any concrete node can be constructed by name alone. This implies that we might want do have a post-construction virtual method, to tidy up after we finish loading the object data.
2 - The base BehaviorTreeNode class has a VariantMap attribute to hold “variables”. This idea stolen shamelessly from UIElement. These “variables” are populated by the JSON loader/parser, and act as a duck-typed PropertyBag. I am working on the premise that users could add new classes later without having to edit the loader. Effectively, “any node can own some named and typed variables”… nothing new here, except this is not a scene node at all…
3 - Each concrete node class has a virtual post-constructor that is used to populate user variables with property values where that is desirable.
It took me most of the day to understand why even a simple tree would not progress in execution, there is a lot to document!
Leith
I had secured the shelter, and felt I could sleep without being interrupted during the night, still, for the first time since I was a child, I felt the need to keep the light on. It seemed to keep them at bay, though I knew I could not afford to burn the midnight oil. At some point in the night, I would dim my lamp, and that would make me a beacon to the undead. They would attack my base, again, and again. They did not have another way, they only knew that I was food, and they needed to attack. Again, and again, endlessly, relentlessly, without mercy or pause. I hoped that bookshelf would sustain the window, and that somehow I would be overlooked in this forlorn environment. Soon it would be dawn, and I had seen with my own eyes how the light affected the undead. They shunned the light. They took to shadows and dark places during the daylight hours. Unfortunately for me, those were the kinds of places I needed to explore, and I was bound to find them in their nest.
Leith
So I finished implementing a “factory-based” JSON loader for owl-bt.
I have some horror stories to tell in another thread, one in particular I think could be useful to others.
The bug presents as a null context_ member in objects derived from Serializable. Ugh. It might not present until you try to destroy stuff.
In other news, it turns out that lezak’s BehaviorTree codebase has a lot of quirks.
Quirk #1: The codebase does not provide for “guard decorators” (aka preconditions) - whose return values dictate whether or not a subtree will be executed (as in UE). Rather, there is support for exactly one “post-execution” Decorator (per node), who will only be executed under very strict circumstances.
Quirk #2 - There are corner cases in the logic where Decorators will never be executed - they are effectively unreachable.
Quirk #3 - The codebase uses an observer pattern to allow child nodes to notify their parent about their current state, prior to returning to said parent with the very same information (I suspect I may know why - its to do with parallel nodes - but its not an easy codebase to follow, with functors doing odd things at odd places in the execution)
There are a lot more quirks than this, needless to say I am not completely in love with the code!
Leith
Yes, sorry about the lack of screen shots lately!
I’m trying to develop a solution for non-player-characters who are still human, and not yet infected by the zombies. I’ve made progress, I am on track, there’s just not a lot to see when testing a new AI system.
Modanung
Appologies accepted.
Leith
I am working on a conditional guard node for ai behavior trees, which can do logical and mathematical comparison operations using values declared in one of three spaces: constant value, agent blackboard variable, and world blackboard variable.
The conditional guard node has me comparing the values of two variants of possibly different yet compatible types. This is ok, in most cases, I think, that we can compare two values of different yet perhaps comparable types. The issue I have for today, is that Urho3D’s Variant class can’t do compare operations at all, other than “equality”.
Urho has one card up its sleeve to help me compare alien primitive data types - the ability to cast string values to a known type, and vice versa. I expect to abuse it to my advantage.
Essentially, we can provide a hint about our preferred datatype when requesting a string-conversion. This can be useful, if we want to kludge all number types for compare purposes, for example
Leith
Actually it surprised me to learn that some people like to watch live streaming of coders doing their thing. I could not immediately understand the appeal, since it’s just stuff I do all day and night, but after a while, I could start to see the appeal, for non-coders, to have a glimpse of a day in the life, or even to drop in and see whats happening over time - let alone for employers to nose around incognito
Modanung
“Homo sum, humani nihil a me alienum puto” – Terence
Leith
Nil desperandum carborundum illegitimi
Leith
I am human, so nothing human is alien to me.
Nice quote.
As a child, I learned to read and write (but not speak) latin.
If I talk in latin to an italian, they don’t understand me.
As a young man, fresh from school, learning to become a master engineer, I worked with a brand of sandpaper, and on the back of it, was a latin inscription.
At first, I did not completely understand its simple meaning.
But I gather that you do.
Modanung
Maybe it could find a nice morbidly ironic place in a zombie game. 
I’m no Roman either. λωλ