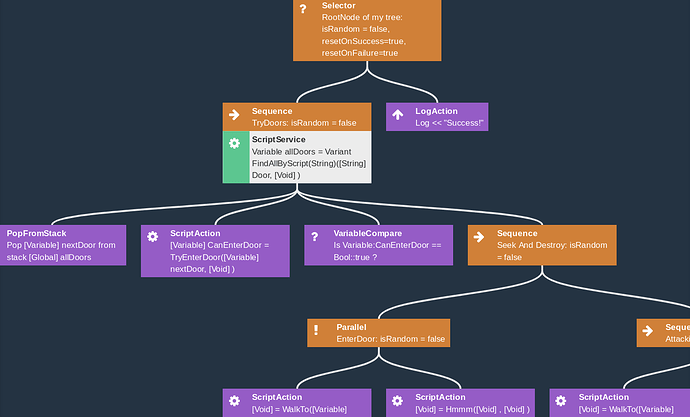
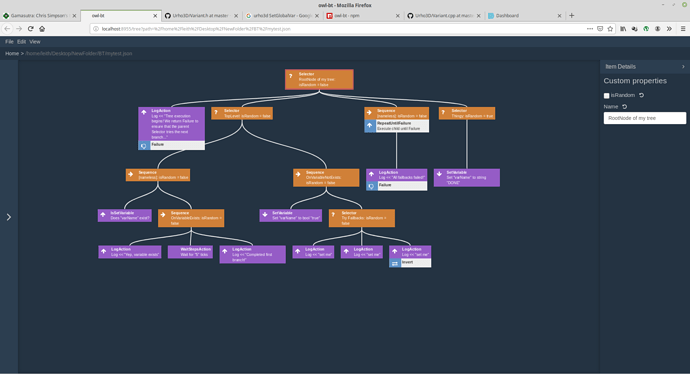
For anyone who is experimenting with owl-bt, or is interested in doing so, here is the json I use to modify the editor for my purposes so far. Maybe you will see something in here you can use too.
This replaces the “owl-bt.json” configuration file… you’ll figure it out if you haven’t already 
{
"nodes": [
{
"name": "Selector",
"icon": "question",
"isComposite": true,
"description": "{{Name}}: isRandom = {{isRandom}}",
"properties": [
{
"name": "isRandom",
"type": "bool",
"value": false,
"default":false
},
{
"name": "Name",
"value":"SelectorNode",
"default":"[nameless]"
}
]
},
{
"name": "Sequence",
"icon": "arrow-right",
"isComposite": true,
"description": "{{Name}}: isRandom = {{isRandom}}",
"properties": [
{
"name": "isRandom",
"type": "bool",
"value": false,
"default":false
},
{
"name": "Name",
"value":"SequenceNode",
"default":"[nameless]"
}
]
},
{
"name": "Something",
"icon": "question",
"isComposite":true,
"description": "Is blackboard value \"{{Field}}\" set",
"properties": [
{
"name": "Field",
"type": "string",
"default":"set me"
}
]
},{
"name": "LogAction",
"icon": "arrow-up",
"isComposite": false,
"description": "Log << \"{{Text}}\"",
"properties": [
{
"name": "Text",
"type": "string",
"default":"set me",
"value": "something"
}
]
},
{
"name": "WaitStepsAction",
"icon": "arrow-",
"isComposite":false,
"description" : "Wait for \"{{Counter}}\" ticks",
"properties": [
{
"name": "Counter",
"type" : "number",
"default":0,
"value": 2
}
]
},
{
"name": "SetVariable",
"icon": "arrow-down",
"isComposite":false,
"description" : "Set \"{{VarName}}\" to {{Type}} \"{{Value}}\"",
"properties": [
{
"name": "VarName",
"default":"[not set]",
"value": "varName"
},
{
"name": "Value",
"default":"[not set]",
"value": "value"
},
{
"name": "Type",
"default": "None",
"type": "enum",
"values": [
"string",
"number",
"bool",
"Panic"
]
}
]
},
{
"name":"IsSetVariable",
"icon": "arrow-up",
"isComposite":false,
"description" : "Does \"{{VarName}}\" exist?",
"properties": [
{
"name": "VarName",
"default":"[not set]",
"value": "varName"
}
]
},{
"name":"SubTree",
"icon":"cog",
"isComposite":false,
"description":"Runs Behavior: \"{{SubTreeName}}\" ... Please Note, {{description}}",
"properties": [
{
"name": "SubTreeName",
"default":"[not set]",
"value": "subTree"
},{
"name": "description",
"default":"[not set]",
"value":"description"
}
]
}
],
"decorators": [
{
"name": "Failure",
"icon": "thumbs-o-down"
},
{
"name": "Invert",
"icon": "exchange"
},
{
"name": "Success",
"icon": "thumbs-o-up"
},
{
"name": "RepeatUntilFailure",
"icon": "arrow-up",
"description":"Execute child until Failure"
}
],
"services": [
{
"name": "Sample service",
"icon": "cog",
"description": "sample service",
"properties": [
{
"name": "BlackboardKey",
"default": "Target",
"type": "string"
},
{
"name": "BlackboardKey2",
"default": "1",
"type": "string"
}
]
},
{
"name": "ScriptFunction",
"icon": "cog",
"description": "Execute a scripted function \"{{FunctionName}}\" with arg1=BBKey \"{{BlackboardKey}}\" and arg2=BBKey \"{{BlackboardKey2}}\" and arg3=number \"{{ConstantNumber}}\"",
"properties": [
{
"name": "FunctionName",
"default": "TakeDamage",
"type": "string"
},
{
"name": "BlackboardKey",
"default": "Target",
"type": "string"
},
{
"name": "BlackboardKey2",
"default": "SomeArg2",
"type": "string"
},
{
"name": "ConstantNumber",
"default": "1",
"type": "number"
}
]
}
]
}




 first of all pardon my laziness
first of all pardon my laziness



 the thing is i dont have enough knowledge to start investing in neural network thing, and i suppose it require much more power than behavior tree to simulate game AIs? we dont need AIs in game to be that super intelligent anyway (just excuses)
the thing is i dont have enough knowledge to start investing in neural network thing, and i suppose it require much more power than behavior tree to simulate game AIs? we dont need AIs in game to be that super intelligent anyway (just excuses)